Architecture fondamentale d’un système hydraulique à servocommande
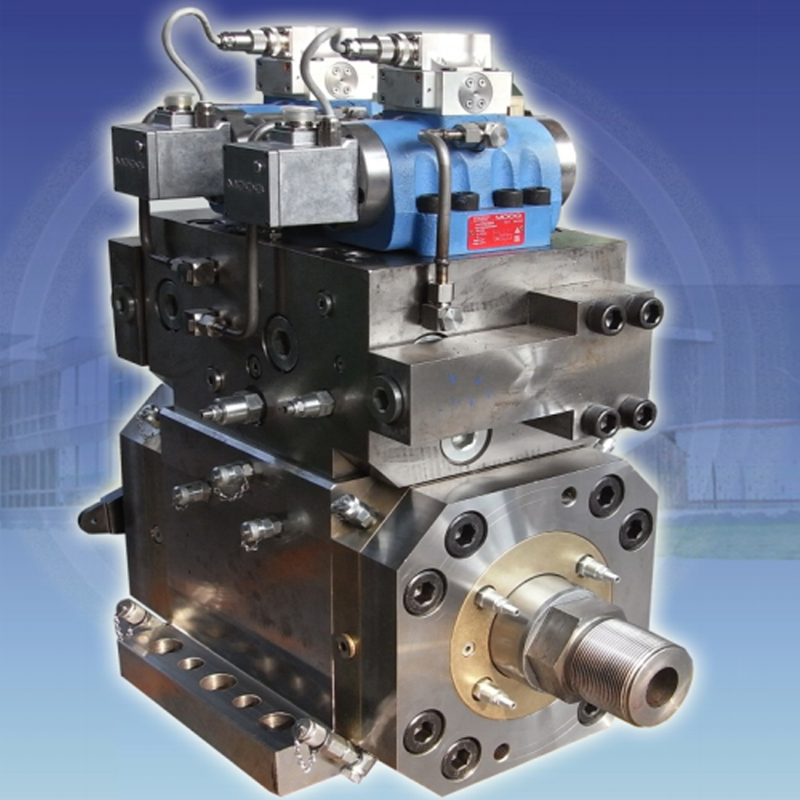
Agencement intégré de l’unité de puissance, de la vanne à servocommande, de l’actionneur et du capteur de rétroaction
L'architecture centrale d'un système hydraulique à servocommande intègre quatre composants interdépendants : l'unité de puissance, la vanne servo, l'actionneur et le capteur de retour. L'unité de puissance — généralement une pompe à débit variable entraînée par un moteur — génère un fluide hydraulique sous pression, contrôlé avec précision. La vanne servo, agissant comme un traducteur électro-hydraulique, module précisément le sens et le débit du fluide en réponse aux signaux de commande électronique. Ce fluide régulé actionne l'actionneur (vérin ou moteur rotatif), transformant l'énergie hydraulique en un mouvement mécanique à forte force et haute précision. Un retour en temps réel sur la position, la vitesse ou la force est fourni par des capteurs tels que des transformateurs différentiels variables linéaires (LVDT) ou des codeurs optiques à haute résolution, permettant ainsi une correction en boucle fermée avec une répétabilité inférieure au millimètre. Dans des applications telles que l'estampage métallique de précision, cette architecture atteint une précision de positionnement de ±0,1 mm en compensant continuellement les dérives thermiques, la déformabilité et la déflexion induite par la charge.
Flux du signal, de l'entrée de commande à la sortie en force/position : l'interface électro-hydraulique
La séquence de commande commence par un signal de commande — généralement une tension ou une consigne numérique provenant d'un automate programmable (API) ou d'un contrôleur de mouvement — qui est converti en déplacement de la tige de distribution au sein de la vanne servo. Cette action dirige le fluide sous pression vers la chambre appropriée de l'actionneur, créant la différence de pression nécessaire au mouvement. Lorsque l'actionneur se déplace, des capteurs de rétroaction transmettent au contrôleur les données réelles de position ou de force, ce dernier calculant alors l'erreur et émettant une sortie corrective. La stabilité repose sur un étalonnage précis : une zone morte non corrigée de la vanne, par exemple, peut provoquer des oscillations dépassant ±2 % de la consigne dans les systèmes à forte inertie. Bien que la compressibilité du fluide et l'inertie mécanique limitent intrinsèquement la bande passante, les contrôleurs modernes utilisent des algorithmes prédictifs — notamment la planification adaptative des gains — afin de maintenir la stabilité lors de transitions rapides de charge de 0 à 100 %, sans compromettre la fidélité de la réponse.

Facteurs déterminants critiques pour les systèmes hydrauliques à servocommande haute performance
Réponse dynamique, limitations de la bande passante et exigences de stabilité en boucle fermée
Les systèmes hydrauliques à servocommande haute performance sont définis par trois impératifs de conception étroitement couplés : la rapidité de réponse dynamique, la bande passante utilisable et la stabilité en boucle fermée. La bande passante — fréquence à laquelle le gain du système chute de 3 dB — est généralement limitée à 15–30 Hz dans les applications industrielles à forte inertie en raison de la résonance hydraulique, de la compressibilité du fluide et de la dynamique des vannes/ actionneurs. Dépasser ces limites comporte des risques de déphasage, de dépassement et d’instabilité ; dans les presses à forge, un dépassement ≥ 5 % peut compromettre l’intégrité des pièces ou endommager les outillages. Les conceptions les plus avancées y remédient grâce à une modélisation rigoureuse de la propagation des ondes de pression et des modes résonants, associée à des stratégies de commande sophistiquées. Par exemple, la régulation adaptative du gain réduit le dépassement de 40 % par rapport à un régulateur PID à paramètres fixes, tout en maintenant une latence de commande < 1 ms, ce qui permet des performances robustes sous des charges et des vitesses variables.
Stratégies d’efficacité énergétique : circuits régénératifs, détection de charge et dissipation thermique
L'efficacité énergétique n'est plus secondaire : elle est désormais intégrale à la viabilité du système. Les circuits régénératifs récupèrent l'énergie d'inertie lors de la décélération, réinjectant jusqu'à 65 % de l'énergie autrement dissipée dans le système. Les pompes à détection de charge adaptent dynamiquement le débit et la pression aux besoins réels des actionneurs, éliminant ainsi les pertes inutiles dues au rétrécissement. La gestion thermique est tout aussi critique : des échangeurs de chaleur compacts couplés à des volumes d'huile optimisés réduisent la charge thermique de 30 % ; les variateurs de vitesse réduisent la consommation d'énergie au ralenti des pompes de 55 % par rapport aux unités à cylindrée fixe ; et les vérins intelligents — dotés de passages internes conçus pour un écoulement laminaire — minimisent les pertes visqueuses. Ensemble, ces stratégies permettent des économies d'énergie globales allant jusqu'à 70 %, tout en assurant une stabilité thermique conforme à la norme ISO 4413 et une intégrité durable du fluide.
Intégration prête pour l'IIoT et diagnostics intelligents dans les systèmes hydrauliques servo modernes
Les systèmes hydrauliques à servocommande modernes intègrent des fonctionnalités de l’Internet industriel des objets (IIoT) afin de transformer la maintenance réactive en une exploitation proactive et fondée sur les données. Des capteurs embarqués mesurant la pression, la température, le débit et les vibrations transmettent en temps réel des données télémétriques à des processeurs périphériques, où des algorithmes prédictifs détectent des anomalies à un stade précoce—telles que l’usure du tiroir de vanne ou la perte de gaz dans l’accumulateur—avant qu’elles ne s’aggravent jusqu’à provoquer une défaillance. Des tableaux de bord connectés au cloud permettent une surveillance à distance de l’état de santé des équipements et des diagnostics, réduisant ainsi les arrêts imprévus jusqu’à 45 %. Des analyses avancées corrélationnent les flux de données provenant de plusieurs capteurs afin d’optimiser la consommation énergétique, de détecter des écarts subtils dans les profils de mouvement et même d’ajuster automatiquement les paramètres de commande—par exemple, en adaptant les courbes de réponse des vannes en fonction des variations de viscosité du fluide mesurées in situ. Cette convergence entre intelligence périphérique et actionnement hydraulique permet une maintenance basée sur l’état, prolongeant la durée de vie des composants et préservant des performances précises tout au long de cycles de service exigeants.
Bonnes pratiques pour le dimensionnement et la sélection des composants dans les applications industrielles servo-hydrauliques
Dimensionnement de la pompe, du vérin, de l’accumulateur et de la vanne proportionnelle servo en fonction du profil de charge et du cycle de service
Le dimensionnement optimal des composants équilibre les performances, l’efficacité et la longévité — et doit impérativement reposer sur le profil de charge réel et le cycle d’utilisation de l’application. Les pompes doivent fournir le débit maximal à la pression requise, sans capacité excédentaire chronique ; un dimensionnement insuffisant provoque un effondrement de la pression sous charge, tandis qu’un dimensionnement excessif augmente la chaleur, le bruit et le gaspillage énergétique. Les accumulateurs, dimensionnés pour l’absorption des pics de charge et la récupération d’énergie, peuvent être réduits jusqu’à 30 % dans les applications à usage intermittent par rapport à un fonctionnement continu. Le diamètre et la course du vérin sont déterminés par les exigences en force et en vitesse, tandis que le diamètre de la tige est soigneusement choisi afin d’éviter le flambage sous charges compressives. Les distributeurs proportionnels doivent répondre aux exigences de bande passante du système : pour les tâches à forte dynamique, telles que la manutention robotisée de matériaux, des distributeurs présentant un temps de réponse < 10 ms et une capacité de débit suffisante sont indispensables. Le cadre suivant guide la sélection :
| CompoNent | Facteur clé de dimensionnement | Considération liée au cycle d’utilisation |
|---|---|---|
| Pompe | Débit à la pression maximale | Puissance continue contre puissance intermittente |
| Cylindre | Force / longueur de course à la vitesse maximale | Usure du joint sous chargement cyclique |
| Accumulateur | Volume de fluide pour l’absorption des surpressions | Maintien de la pression de précharge |
| Robinet servo | Bande passante par rapport à la réponse du système | Dissipation de la chaleur pendant le cyclage |
Résolution du capteur, fréquence d’échantillonnage du contrôleur et réglage en temps réel pour une commande de mouvement précise
La commande de mouvement au niveau micron exige une fidélité proportionnelle dans toute la chaîne de signal. La résolution du capteur doit dépasser la précision cible d’au moins un facteur 5 : ainsi, une tolérance de position de ±5 μm exige une résolution de capteur d’au plus 1 μm. Les fréquences d’échantillonnage du contrôleur doivent être de 5 à 10 fois la bande passante effective du système afin d’éviter le repliement de spectre et le déphasage ; pour un système dont la bande passante est de 100 Hz, un échantillonnage de 500 à 1000 Hz est obligatoire. Le réglage en temps réel — à l’aide d’algorithmes PID adaptatifs — ajuste dynamiquement les gains en réponse aux variations de frottement, de charge ou de température, réduisant ainsi le temps de stabilisation de 40 % dans des environnements aux conditions variables. L’analyse des vibrations lors de la mise en service permet d’identifier et de supprimer les résonances mécaniques, garantissant un mouvement stable et sans saccades sur toute la plage de fonctionnement.

FAQ
Quels sont les composants principaux d’un système hydraulique asservi ?
Les composants principaux d’un système hydraulique asservi sont l’unité de puissance, la vanne servopilotée, l’actionneur et le capteur de retour.
Comment un système hydraulique à servocommande atteint-il une grande précision de positionnement ?
Le système atteint une grande précision de positionnement grâce à une rétroaction en temps réel et à une correction en boucle fermée qui compense la dérive thermique, la déformabilité et la déflexion induite par la charge.
Quelles sont quelques stratégies d’efficacité énergétique dans les systèmes hydrauliques à servocommande ?
Les stratégies d’efficacité énergétique comprennent les circuits régénératifs, les pompes à détection de charge, les échangeurs de chaleur compacts et les variateurs de vitesse.
Comment l’IIoT et les diagnostics intelligents sont-ils intégrés dans les systèmes hydrauliques à servocommande modernes ?
L’IIoT et les diagnostics intelligents sont intégrés au moyen de capteurs embarqués et de télémétrie en temps réel, permettant ainsi la maintenance prédictive et l’optimisation des performances du système.
Quelle est l’importance du dimensionnement des composants dans les applications industrielles hydrauliques à servocommande ?
Le dimensionnement des composants doit tenir compte du profil de charge et du cycle de fonctionnement de l’application, en équilibrant performance, efficacité et longévité.
Table des matières
- Architecture fondamentale d’un système hydraulique à servocommande
- Facteurs déterminants critiques pour les systèmes hydrauliques à servocommande haute performance
- Intégration prête pour l'IIoT et diagnostics intelligents dans les systèmes hydrauliques servo modernes
- Bonnes pratiques pour le dimensionnement et la sélection des composants dans les applications industrielles servo-hydrauliques
-
FAQ
- Quels sont les composants principaux d’un système hydraulique asservi ?
- Comment un système hydraulique à servocommande atteint-il une grande précision de positionnement ?
- Quelles sont quelques stratégies d’efficacité énergétique dans les systèmes hydrauliques à servocommande ?
- Comment l’IIoT et les diagnostics intelligents sont-ils intégrés dans les systèmes hydrauliques à servocommande modernes ?
- Quelle est l’importance du dimensionnement des composants dans les applications industrielles hydrauliques à servocommande ?