สถาปัตยกรรมพื้นฐานของระบบไฮดรอลิกแบบเซอร์โว
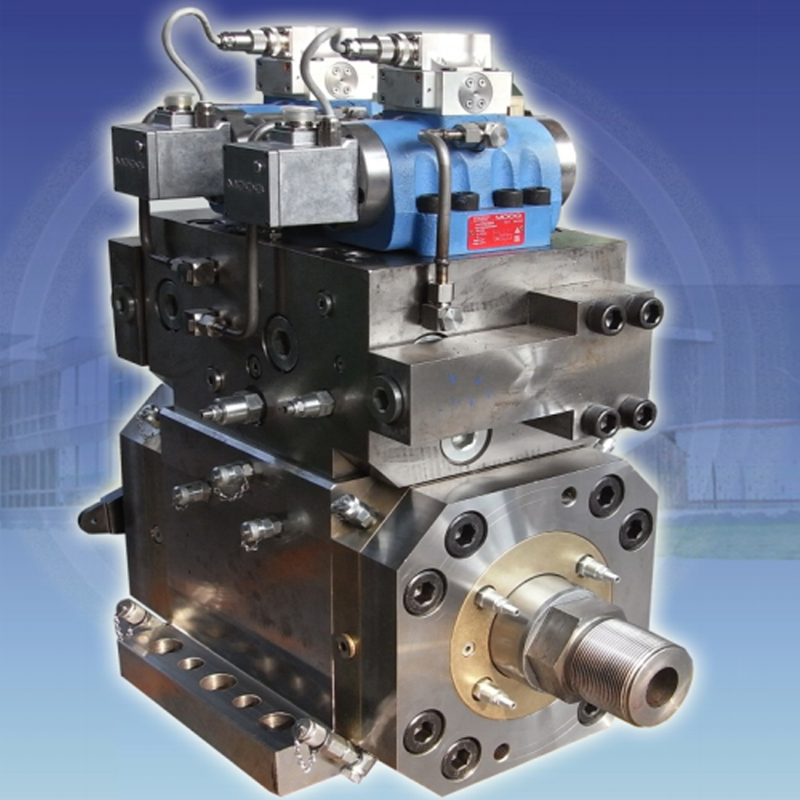
การจัดวางหน่วยแหล่งพลังงานแบบบูรณาการ วาล์วแบบเซอร์โว แอคทูเอเตอร์ และเซ็นเซอร์ตรวจจับตำแหน่งแบบป้อนกลับ
สถาปัตยกรรมหลักของระบบไฮดรอลิกแบบเซอร์โวประกอบด้วยส่วนประกอบที่พึ่งพาอาศัยกันอย่างใกล้ชิดสี่ส่วน ได้แก่ หน่วยให้พลังงาน วาล์วเซอร์โว แอคทูเอเตอร์ และเซ็นเซอร์รับข้อมูลย้อนกลับ หน่วยให้พลังงาน—ซึ่งมักเป็นปั๊มแบบปรับการจ่ายน้ำมันได้ (variable-displacement pump) ที่ขับเคลื่อนด้วยมอเตอร์—ทำหน้าที่สร้างของไหลไฮดรอลิกภายใต้ความดันที่ควบคุมได้อย่างแม่นยำ วาล์วเซอร์โวทำหน้าที่เป็นตัวแปลงสัญญาณระหว่างไฟฟ้ากับไฮดรอลิก โดยปรับทิศทางและปริมาตรของการไหลอย่างแม่นยำตามสัญญาณควบคุมแบบอิเล็กทรอนิกส์ ของไหลที่ผ่านการควบคุมแล้วนี้จะขับเคลื่อนแอคทูเอเตอร์ (กระบอกสูบหรือมอเตอร์แบบหมุน) เพื่อเปลี่ยนพลังงานไฮดรอลิกให้กลายเป็นการเคลื่อนที่เชิงกลที่มีแรงสูงและความแม่นยำสูง เซ็นเซอร์ เช่น ตัวแปลงความแตกต่างของแรงดันตัวแปรเชิงเส้น (LVDTs) หรือเอนโคเดอร์ออปติคัลความละเอียดสูง จะให้ข้อมูลย้อนกลับแบบเรียลไทม์เกี่ยวกับตำแหน่ง ความเร็ว หรือแรง ซึ่งทำให้สามารถปรับแก้แบบวงจรปิด (closed-loop) ได้ด้วยความซ้ำซ้อนที่แม่นยำถึงระดับย่อยกว่าหนึ่งมิลลิเมตร สำหรับการใช้งานในงานตอกโลหะแบบความแม่นยำสูง (precision metal stamping) สถาปัตยกรรมนี้สามารถบรรลุความแม่นยำในการระบุตำแหน่งที่ ±0.1 มม. ได้โดยการชดเชยอย่างต่อเนื่องต่อการเปลี่ยนแปลงจากอุณหภูมิ (thermal drift) ความยืดหยุ่นของโครงสร้าง (compliance) และการเบี่ยงเบนจากแรงโหลด (load-induced deflection)
ลำดับการส่งสัญญาณจากสัญญาณคำสั่งไปยังผลลัพธ์แรง/ตำแหน่ง: อินเทอร์เฟซไฟฟ้า-ไฮดรอลิก
ลำดับการควบคุมเริ่มต้นด้วยสัญญาณคำสั่ง—โดยทั่วไปเป็นสัญญาณแรงดันไฟฟ้าหรือค่าตั้งแบบดิจิทัลจาก PLC หรือตัวควบคุมการเคลื่อนที่ ซึ่งจะถูกแปลงให้เกิดการเคลื่อนที่ของสปูลภายในวาล์วเซอร์โว จากนั้นการกระทำนี้จะส่งของไหลภายใต้ความดันไปยังห้องของแอคทูเอเตอร์ที่เหมาะสม เพื่อสร้างความต่างของความดันที่จำเป็นสำหรับการเคลื่อนที่ เมื่อแอคทูเอเตอร์เคลื่อนที่ เซนเซอร์ตรวจสอบย้อนกลับจะส่งข้อมูลตำแหน่งหรือแรงจริงกลับไปยังตัวควบคุม ซึ่งจะคำนวณค่าความคลาดเคลื่อนและส่งสัญญาณปรับแก้ที่เหมาะสมออกไป ความมั่นคงของการควบคุมขึ้นอยู่กับการปรับคาลิเบรตอย่างแม่นยำ เช่น ช่วงความตาย (deadband) ของวาล์วที่ไม่ได้รับการปรับแก้สามารถก่อให้เกิดการสั่นสะเทือนเกิน ±2% ของค่าตั้งในระบบที่มีอินเนอร์เชียสูง แม้ว่าความบีบอัดของของไหลและความเฉื่อยเชิงกลจะจำกัดแบนด์วิดท์โดยธรรมชาติ แต่ตัวควบคุมสมัยใหม่ใช้อัลกอริทึมเชิงทำนาย—รวมถึงการปรับค่า gain แบบปรับตัวตามสภาวะ (adaptive gain scheduling)—เพื่อรักษาความมั่นคงระหว่างการเปลี่ยนโหลดอย่างรวดเร็วจาก 0–100% โดยไม่ลดทอนความแม่นยำในการตอบสนอง

ปัจจัยสำคัญที่มีผลต่อการออกแบบระบบไฮดรอลิกแบบเซอร์โวประสิทธิภาพสูง
การตอบสนองเชิงพลศาสตร์ ข้อจำกัดของแบนด์วิดธ์ และข้อกำหนดด้านความมั่นคงของระบบควบคุมแบบปิดลูป
ระบบไฮดรอลิกแบบเซอร์โวประสิทธิภาพสูงนิยามโดยข้อกำหนดเชิงการออกแบบสามประการที่ผสานกันอย่างแน่นหนา ได้แก่ ความเร็วในการตอบสนองแบบไดนามิก แบนด์วิดท์ที่ใช้งานได้ และเสถียรภาพของระบบควบคุมแบบปิดลูป แบนด์วิดท์—ซึ่งหมายถึงความถี่ที่ค่ากำไรของระบบลดลง 3 เดซิเบล—มักถูกจำกัดไว้ที่ 15–30 เฮิร์ตซ์ในแอปพลิเคชันอุตสาหกรรมที่มีอินเนอร์เชียสูง เนื่องจากปรากฏการณ์เรโซแนนซ์ของไฮดรอลิก ความสามารถในการบีบอัดของของไหล และพลวัตของวาล์ว/แอคทูเอเตอร์ การทำงานเกินขีดจำกัดเหล่านี้อาจก่อให้เกิดความล่าช้าของเฟส (phase lag) การเกินค่า (overshoot) และความไม่เสถียร; โดยในเครื่องกดขึ้นรูปแบบฟอร์จิ้ง การเกินค่า ≥5% อาจส่งผลให้ชิ้นส่วนสูญเสียความสมบูรณ์หรือทำให้อุปกรณ์ขึ้นรูปเสียหาย แนวทางการออกแบบชั้นนำจัดการปัญหานี้ด้วยการสร้างแบบจำลองอย่างเข้มงวดเกี่ยวกับการแพร่กระจายของคลื่นความดันและโหมดเรโซแนนซ์ ควบคู่ไปกับกลยุทธ์การควบคุมขั้นสูง เช่น การปรับค่า gain แบบปรับตัว (adaptive gain scheduling) ซึ่งสามารถลดการเกินค่าลงได้ 40% เมื่อเทียบกับ PID แบบพารามิเตอร์คงที่ ในขณะที่ยังคงความหน่วงเวลาในการควบคุม (control latency) ต่ำกว่า 1 มิลลิวินาที—ส่งผลให้ระบบมีประสิทธิภาพที่แข็งแกร่งแม้ภายใต้ภาระงานและความเร็วที่เปลี่ยนแปลง
กลยุทธ์เพื่อประสิทธิภาพการใช้พลังงาน: วงจรรีเจนเนอเรทีฟ (regenerative circuits), การตรวจจับภาระงาน (load-sensing), และการจัดการการกระจายความร้อน (heat dissipation)
ประสิทธิภาพด้านพลังงานไม่ใช่เรื่องรองอีกต่อไป — แต่เป็นส่วนสำคัญที่จำเป็นต่อความน่าเชื่อถือของระบบโดยรวม วงจรรีเจนเนอเรทีฟ (Regenerative circuits) สามารถกู้คืนพลังงานจากความเฉื่อยในระหว่างการลดความเร็ว และส่งพลังงานกลับเข้าสู่ระบบได้สูงสุดถึง 65% ของพลังงานที่มิฉะนั้นจะสูญเสียไปโดยเปล่าประโยชน์ ปั๊มแบบตรวจจับภาระ (Load-sensing pumps) ปรับอัตราการไหลและแรงดันให้สอดคล้องกับความต้องการของแอคทูเอเตอร์แบบเรียลไทม์อย่างไดนามิก จึงขจัดการสูญเสียพลังงานจากการควบคุมการไหล (throttling losses) ที่ไม่จำเป็นออกไปได้อย่างสิ้นเชิง การจัดการความร้อนก็มีความสำคัญไม่แพ้กัน: แลกเปลี่ยนความร้อนแบบคอมแพกต์ (compact heat exchangers) ที่จับคู่กับปริมาตรน้ำมันที่ผ่านการปรับให้เหมาะสม ช่วยลดภาระความร้อนลงได้ 30%; ไดรฟ์ความเร็วแปรผัน (variable-speed drives) ลดการใช้พลังงานขณะปั๊มหยุดนิ่งลงได้ 55% เมื่อเทียบกับหน่วยปั๊มแบบปริมาตรคงที่ (fixed-displacement units); และการออกแบบกระบอกสูบอัจฉริยะ (smart cylinder designs) ที่มีช่องทางภายในสำหรับการไหลแบบลามินาร์ (laminar-flow internal passages) ช่วยลดการสูญเสียจากความหนืดให้น้อยที่สุด กลยุทธ์เหล่านี้ร่วมกันส่งผลให้เกิดการประหยัดพลังงานทั่วทั้งระบบสูงสุดถึง 70% ขณะยังคงรักษาเสถียรภาพอุณหภูมิให้เป็นไปตามมาตรฐาน ISO 4413 และรักษาคุณสมบัติของของเหลวให้คงทนในระยะยาว
การผสานรวมที่พร้อมสำหรับ IIoT และการวินิจฉัยอัจฉริยะในระบบไฮดรอลิกเซอร์โวสมัยใหม่
ระบบไฮดรอลิกแบบเซอร์โวที่ทันสมัย ผสานความสามารถของอินเทอร์เน็ตแห่งสรรพสิ่งสำหรับภาคอุตสาหกรรม (IIoT) เพื่อเปลี่ยนการบำรุงรักษาแบบตอบสนองเหตุการณ์ให้กลายเป็นการดำเนินงานเชิงรุกที่ขับเคลื่อนด้วยข้อมูล ซึ่งเซ็นเซอร์วัดความดัน อุณหภูมิ อัตราการไหล และการสั่นสะเทือนที่ติดตั้งอยู่บนระบบจะส่งข้อมูลโทรมาตรแบบเรียลไทม์ไปยังโปรเซสเซอร์ขอบ (edge processors) ที่ซึ่งอัลกอริธึมการทำนายสามารถระบุความผิดปกติในระยะเริ่มต้น—เช่น การสึกหรอของสปูลวาล์ว หรือการรั่วของก๊าซในแอคคิวมูเลเตอร์—ก่อนที่ปัญหาเหล่านั้นจะลุกลามจนเกิดความล้มเหลว แดชบอร์ดที่เชื่อมต่อกับคลาวด์ช่วยให้สามารถตรวจสอบสุขภาพของระบบและวินิจฉัยปัญหาจากระยะไกล ลดเวลาหยุดทำงานโดยไม่ได้วางแผนไว้ได้สูงสุดถึง 45% การวิเคราะห์ขั้นสูงจะผสานข้อมูลจากหลายแหล่งเซ็นเซอร์เข้าด้วยกันเพื่อปรับปรุงประสิทธิภาพการใช้พลังงาน ตรวจจับความเบี่ยงเบนที่ละเอียดอ่อนในลักษณะการเคลื่อนที่ และแม้แต่ปรับแต่งพารามิเตอร์การควบคุมโดยอัตโนมัติ—ตัวอย่างเช่น การปรับเส้นโค้งการตอบสนองของวาล์วตามการเปลี่ยนแปลงของความหนืดของของไหลที่วัดได้จริงในสถานที่นั้นๆ การผสานรวมกันระหว่างปัญญาประดิษฐ์ระดับขอบ (edge intelligence) กับการขับเคลื่อนด้วยระบบไฮดรอลิกนี้ ทำให้สามารถดำเนินการบำรุงรักษาตามสภาพจริงของอุปกรณ์ (condition-based maintenance) ได้ ซึ่งช่วยยืดอายุการใช้งานของชิ้นส่วนและรักษาประสิทธิภาพในการทำงานที่แม่นยำอย่างต่อเนื่อง แม้ภายใต้สภาวะการใช้งานที่หนักหนาสาหัส
แนวทางปฏิบัติที่ดีที่สุดสำหรับการกำหนดขนาดและคัดเลือกชิ้นส่วนสำหรับการใช้งานไฮดรอลิกแบบเซอร์โวในอุตสาหกรรม
การกำหนดขนาดปั๊ม กระบอกสูบ แอคคิวมูเลเตอร์ และวาล์วแบบสัดส่วน-เซอร์โว โดยอิงตามโปรไฟล์โหลดและรอบการทำงาน
การปรับขนาดชิ้นส่วนให้เหมาะสมที่สุดจะต้องสมดุลระหว่างประสิทธิภาพ ประสิทธิผล และอายุการใช้งาน—โดยต้องยึดตามโปรไฟล์โหลดจริงและรอบการทำงาน (duty cycle) ของแอปพลิเคชันนั้นๆ โดยปั๊มต้องสามารถจ่ายอัตราการไหลสูงสุดที่ความดันที่กำหนดไว้ได้โดยไม่มีกำลังเกินอย่างเรื้อรัง การเลือกขนาดปั๊มที่เล็กเกินไปจะทำให้ความดันลดลงอย่างรุนแรงภายใต้ภาระงาน ในขณะที่การเลือกขนาดใหญ่เกินไปจะเพิ่มความร้อน เสียงรบกวน และการสูญเสียพลังงาน แอคคิวมูเลเตอร์ซึ่งออกแบบให้รองรับการดูดซับแรงกระแทกและการกู้คืนพลังงาน สามารถลดขนาดลงได้สูงสุดถึง 30% สำหรับแอปพลิเคชันที่ทำงานแบบเป็นช่วงๆ เมื่อเทียบกับการใช้งานแบบต่อเนื่อง ขนาดเส้นผ่านศูนย์กลางและระยะชักของกระบอกสูบจะขึ้นอยู่กับความต้องการแรงและอัตราเร็ว โดยขนาดเส้นผ่านศูนย์กลางของก้านกระบอกสูบจะต้องเลือกอย่างระมัดระวังเพื่อป้องกันการโก่งตัวภายใต้แรงอัด วาล์วเซอร์โวต้องตอบสนองต่อความต้องการแบนด์วิดท์ของระบบ: สำหรับงานที่มีไดนามิกสูง เช่น การจัดการวัสดุโดยหุ่นยนต์ จำเป็นต้องใช้วาล์วที่มีเวลาตอบสนองน้อยกว่า 10 มิลลิวินาที และมีความสามารถในการจ่ายอัตราการไหลเพียงพอ โครงสร้างพื้นฐานต่อไปนี้จะช่วยแนะนำการเลือก:
| ชิ้นส่วน | ปัจจัยสำคัญในการปรับขนาด | พิจารณาจากรอบการทำงาน (Duty Cycle) |
|---|---|---|
| ปั๊มน้ำ | อัตราการไหลที่ความดันสูงสุด | กำลังแบบต่อเนื่องเทียบกับกำลังแบบเป็นช่วงๆ |
| กระบอก | แรง/ความยาวการเคลื่อนที่ที่ความเร็วสูงสุด | การสึกหรอของซีลภายใต้การรับโหลดแบบเป็นรอบ |
| เครื่องสะสม | ปริมาตรของของเหลวสำหรับดูดซับแรงกระแทกชั่วคราว | การรักษาระดับความดันเริ่มต้น (Pre-charge pressure) |
| วาล์วเซอร์โว | แบนด์วิดท์เทียบกับการตอบสนองของระบบ | การกระจายความร้อนระหว่างการใช้งานแบบเป็นรอบ |
ความละเอียดของทรานสดิวเซอร์ อัตราการสุ่มตัวอย่างของคอนโทรลเลอร์ และการปรับแต่งแบบเรียลไทม์เพื่อควบคุมการเคลื่อนที่อย่างแม่นยำ
การควบคุมการเคลื่อนที่ในระดับไมครอนต้องการความเที่ยงตรงแบบสัดส่วนตลอดทั้งสายสัญญาณ การละเอียดของตัวแปลงสัญญาณ (transducer) ต้องสูงกว่าความแม่นยำเป้าหมายอย่างน้อย 5 เท่า — ดังนั้น ความคลาดเคลื่อนตำแหน่ง ±5 ไมครอน จึงต้องใช้ความละเอียดของเซ็นเซอร์ไม่เกิน 1 ไมครอน อัตราการสุ่มตัวอย่าง (sampling rate) ของตัวควบคุมต้องสูงกว่าแบนด์วิดท์ที่มีประสิทธิภาพของระบบ 5–10 เท่า เพื่อหลีกเลี่ยงปรากฏการณ์ aliasing และการหน่วงเฟส (phase lag) สำหรับระบบที่มีแบนด์วิดท์ 100 เฮิร์ตซ์ จึงจำเป็นต้องใช้อัตราการสุ่มตัวอย่างที่ 500–1000 เฮิร์ตซ์ การปรับแต่งแบบเรียลไทม์โดยใช้อัลกอริธึม PID แบบปรับตัว (adaptive PID) จะปรับค่า gain อย่างไดนามิกตามการเปลี่ยนแปลงของแรงเสียดทาน ภาระงาน หรืออุณหภูมิ ทำให้เวลาที่ระบบเข้าสู่สภาวะคงที่ (settling time) ลดลง 40% ในสภาพแวดล้อมที่มีปัจจัยแปรผัน การวิเคราะห์การสั่นสะเทือนระหว่างขั้นตอนการติดตั้ง (commissioning) ช่วยระบุและลดการสั่นพ้องเชิงกล (mechanical resonances) ให้มั่นใจว่าการเคลื่อนที่จะมีเสถียรภาพและปราศจากความสั่นไหว (jitter-free) ตลอดขอบเขตการใช้งานทั้งหมด

คำถามที่พบบ่อย
องค์ประกอบหลักของระบบไฮดรอลิกแบบเซอร์โวคืออะไร
องค์ประกอบหลักของระบบไฮดรอลิกแบบเซอร์โว ได้แก่ หน่วยจ่ายพลังงาน (power unit), วาล์วเซอร์โว (servo valve), แอคทูเอเตอร์ (actuator) และเซ็นเซอร์ป้อนกลับ (feedback sensor)
ระบบไฮดรอลิกแบบเซอร์โวสามารถบรรลุความแม่นยำสูงในการกำหนดตำแหน่งได้อย่างไร
ระบบบรรลุความแม่นยำสูงในการกำหนดตำแหน่งผ่านการตอบกลับแบบเรียลไทม์และการแก้ไขแบบปิดห่วง (closed-loop) ซึ่งชดเชยการเปลี่ยนแปลงของตำแหน่งที่เกิดจากความร้อน (thermal drift) ความยืดหยุ่นของโครงสร้าง (compliance) และการเบี่ยงเบนที่เกิดจากภาระ (load-induced deflection)
กลยุทธ์ใดบ้างที่ใช้เพื่อเพิ่มประสิทธิภาพการใช้พลังงานในระบบไฮดรอลิกแบบเซอร์โว
กลยุทธ์เพื่อเพิ่มประสิทธิภาพการใช้พลังงาน ได้แก่ วงจรคืนพลังงาน (regenerative circuits), ปั๊มตรวจจับภาระ (load-sensing pumps), เครื่องแลกเปลี่ยนความร้อนแบบกะทัดรัด (compact heat exchangers) และไดรฟ์ปรับความเร็วแปรผัน (variable-speed drives)
เทคโนโลยี IIoT และการวินิจฉัยอัจฉริยะถูกผสานเข้ากับระบบไฮดรอลิกแบบเซอร์โวสมัยใหม่อย่างไร
การผสานเทคโนโลยี IIoT และการวินิจฉัยอัจฉริยะทำได้ผ่านเซ็นเซอร์ติดตั้งภายในระบบและข้อมูลโทรมาตรแบบเรียลไทม์ (real-time telemetry) ซึ่งช่วยให้สามารถดำเนินการบำรุงรักษาเชิงพยากรณ์ (predictive maintenance) และเพิ่มประสิทธิภาพการทำงานของระบบ
สิ่งใดที่สำคัญต่อการเลือกขนาดของชิ้นส่วนในแอปพลิเคชันอุตสาหกรรมที่ใช้ระบบไฮดรอลิกแบบเซอร์โว
การเลือกขนาดของชิ้นส่วนควรพิจารณาจากลักษณะภาระ (load profile) และรอบการทำงาน (duty cycle) ของแอปพลิเคชัน โดยคำนึงถึงสมดุลระหว่างประสิทธิภาพ ประสิทธิผลในการใช้พลังงาน และอายุการใช้งาน
สารบัญ
- สถาปัตยกรรมพื้นฐานของระบบไฮดรอลิกแบบเซอร์โว
- ปัจจัยสำคัญที่มีผลต่อการออกแบบระบบไฮดรอลิกแบบเซอร์โวประสิทธิภาพสูง
- การผสานรวมที่พร้อมสำหรับ IIoT และการวินิจฉัยอัจฉริยะในระบบไฮดรอลิกเซอร์โวสมัยใหม่
- แนวทางปฏิบัติที่ดีที่สุดสำหรับการกำหนดขนาดและคัดเลือกชิ้นส่วนสำหรับการใช้งานไฮดรอลิกแบบเซอร์โวในอุตสาหกรรม
-
คำถามที่พบบ่อย
- องค์ประกอบหลักของระบบไฮดรอลิกแบบเซอร์โวคืออะไร
- ระบบไฮดรอลิกแบบเซอร์โวสามารถบรรลุความแม่นยำสูงในการกำหนดตำแหน่งได้อย่างไร
- กลยุทธ์ใดบ้างที่ใช้เพื่อเพิ่มประสิทธิภาพการใช้พลังงานในระบบไฮดรอลิกแบบเซอร์โว
- เทคโนโลยี IIoT และการวินิจฉัยอัจฉริยะถูกผสานเข้ากับระบบไฮดรอลิกแบบเซอร์โวสมัยใหม่อย่างไร
- สิ่งใดที่สำคัญต่อการเลือกขนาดของชิ้นส่วนในแอปพลิเคชันอุตสาหกรรมที่ใช้ระบบไฮดรอลิกแบบเซอร์โว