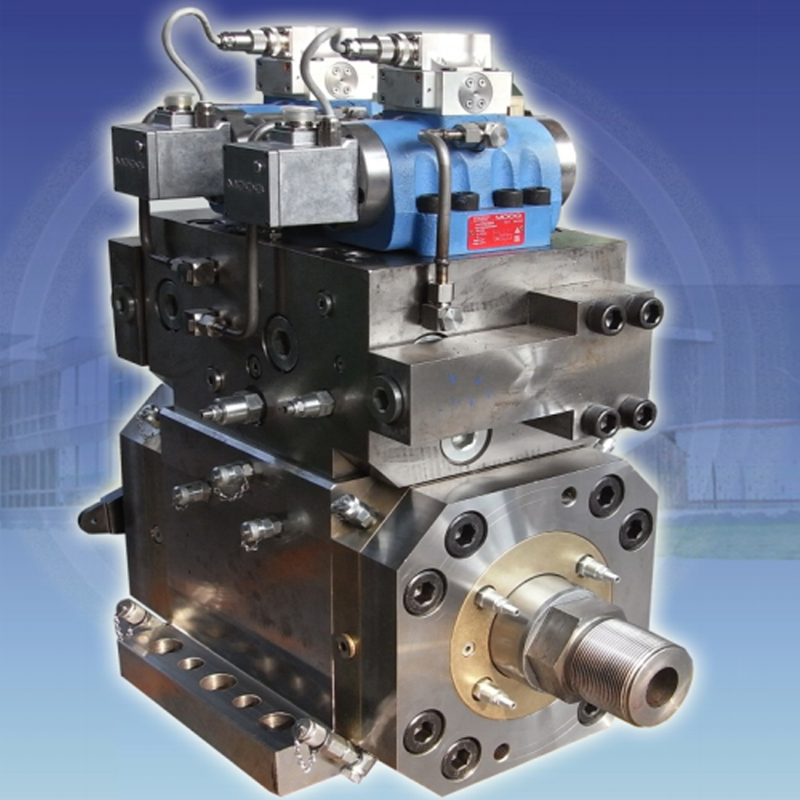
Grundlæggende arkitektur for et servohydraulisk system
Integreret strømforsyningsenhed, servoventil, aktuator og feedbacksensorlayout
En servohydraulisk systems kernearkitektur integrerer fire indbyrdes afhængige komponenter: kraftenheden, servoventilen, aktuatoren og feedbacksensoren. Kraftenheden – typisk en pumpe med variabel fortrængning, der drives af en motor – genererer kontrolleret, trykbevaret hydraulikvæske. Servoventilen, som fungerer som den elektro-hydrauliske oversætter, justerer præcist strømningsretningen og -mængden som respons på elektroniske styresignaler. Denne regulerede væske driver aktuatoren (cylinder eller roterende motor), der omdanner hydraulisk energi til mekanisk bevægelse med høj kraft og høj nøjagtighed. Realtime-feedback om position, hastighed eller kraft leveres af sensorer såsom lineære variable differentielle transformatorer (LVDT’er) eller optiske encoder med høj opløsning – hvilket muliggør lukket-loop-korrektion med gentagelighed på under én millimeter. I anvendelser som præcisionsmetaltrykning opnår denne arkitektur en positionsnøjagtighed på ±0,1 mm ved at kompensere kontinuerligt for termisk drift, elasticitet og lastbetinget udbøjning.
Signalstrøm fra kommandoinddata til kraft-/positionsuddata: Den elektrohydrauliske grænseflade
Styringssekvensen starter med et kommandosignal – typisk en spænding eller et digitalt referencepunkt fra en PLC eller bevægelsesstyring – som omdannes til skyderforskydning inden for servoventilen. Denne handling styrer trykfluidet til den relevante aktuatorkammer, hvilket skaber den nødvendige trykforskel for bevægelse. Når aktuatoren bevæger sig, sender feedback-sensorer faktiske positions- eller kraftdata til styringen, som beregner fejlen og udsender en korrektiv udgang. Stabiliteten afhænger af præcis kalibrering: f.eks. kan en ikke-korrigeret ventildødbånd inducere svingninger på over ±2 % af referencepunktet i systemer med høj inertie. Selvom fluidets kompressibilitet og mekanisk inertie naturligt begrænser båndbredden, anvender moderne styringer prædiktive algoritmer – herunder adaptiv forstærkningsplanlægning – for at opretholde stabilitet under hurtige 0–100 % belastningsovergange uden at ofre responsnøjagtigheden.

Kritiske designkrav for højtydende servo-hydrauliske systemer
Dynamisk respons, båndbreddebegrænsninger og krav til lukket-loop-stabilitet
Højtydende servohydrauliske systemer defineres af tre tæt forbundne designkrav: dynamisk responshastighed, brugbar båndbredde og lukket-loop-stabilitet. Båndbredden – den frekvens, hvor systemforstærkningen falder med 3 dB – er typisk begrænset til 15–30 Hz i industrielle applikationer med høj inertie på grund af hydraulisk resonans, væskens kompressibilitet og ventil-/aktuator-dynamik. At overskride disse grænser medfører risiko for faseforskydning, overshoot og ustabilitet; ved smedepresser kan et overshoot på ≥5 % påvirke deleintegriteten negativt eller beskadige værktøjet. Førende designs løser dette gennem omhyggelig modellering af trykbølgeudbredelse og resonansmoder kombineret med avancerede styringsstrategier. Adaptiv forstærkningsplanlægning reducerer f.eks. overshoot med 40 % sammenlignet med faste PID-parametre, samtidig med at den opretholder en styretid på <1 ms – hvilket muliggør robust ydelse ved varierende belastninger og hastigheder.
Energi-effektivitetsstrategier: Regenerativ kredsløb, lastfølsomhed og varmeafledning
Energibesparelse er ikke længere sekundær – den er nu integreret i systemets overlevelse. Regenerativt kredsløb genopfanger inertiel energi under deceleration og leder op til 65 % af ellers spildt effekt tilbage til systemet. Lastfølsomme pumper justerer dynamisk strømningshastighed og tryk efter aktuatorernes reelle behov i realtid, hvilket eliminerer unødige tab fra dæmpeforløb. Termisk styring er lige så afgørende: kompakte varmevekslere kombineret med optimerede olievolumener reducerer den termiske belastning med 30 %; variabelhastighedsdrev reducerer pumpens standby-energiforbrug med 55 % i forhold til fastvolumen-enheder; og intelligente cylinderdesigns – med laminar-strømningsindrettede interne kanaler – minimerer viskøse tab. Sammen sikrer disse strategier op til 70 % energibesparelse på tværs af hele systemet, samtidig med at de opretholder termisk stabilitet i overensstemmelse med ISO 4413 samt langvarig fluidintegritet.
IIoT-klar integration og intelligent diagnostik i moderne servo-hydrauliske systemer
Moderne servohydrauliske systemer integrerer funktioner fra Industrial Internet of Things (IIoT), hvilket omdanner reaktiv vedligeholdelse til proaktiv, datadreven drift. Tryk-, temperatur-, strømnings- og vibrationsfølere om bord sender realtids-telemetri til edge-processorer, hvor prædiktive algoritmer identificerer tidlige afvigelser – såsom slid på ventilspoler eller tab af gas i akkumulatorer – inden de udvikler sig til fejl. Cloud-forbundne kontrolpaneler muliggør fjernovervågning af systemets helbred og diagnostik, hvilket reducerer uplanlagt nedetid med op til 45 %. Avancerede analyser korrelérer datastrømme fra flere sensorer for at optimere energiforbruget, registrere subtile afvigelser i bevægelsesprofiler og endda automatisk justere reguleringsparametre – f.eks. justere ventilresponskurver baseret på målte ændringer i væskeviskositeten i realtid. Denne sammenfletning af edge-intelligens og hydraulisk aktivering gør betingelsesbaseret vedligeholdelse mulig, hvilket forlænger komponenters levetid og sikrer præcist ydeevne under krævende driftscykler.
Bedste praksis for dimensionering og valg af komponenter til industrielle servo-hydrauliske applikationer
Dimensionering af pumpe, cylinder, akkumulator og proportional-servoventil baseret på belastningsprofil og brugscyklus
Optimal dimensionering af komponenter balancerer ydelse, effektivitet og levetid – og skal være baseret på applikationens faktiske belastningsprofil og driftscyklus. Pumper skal levere maksimalt flow ved den krævede tryk uden kronisk overkapacitet; for lille dimensionering medfører trykfald under belastning, mens for stor dimensionering øger varmeudvikling, støj og energispild. Akkumulatorer, der er dimensioneret til at absorbere spidsbelastninger og genvinde energi, kan reduceres med op til 30 % i applikationer med diskontinuerlig drift sammenlignet med kontinuerlig drift. Cylinderens diameter og slaglængde bestemmes ud fra kravene til kraft og hastighed, mens stangdiameteren omhyggeligt vælges for at forhindre knækning under trykbelastning. Servoventiler skal opfylde systemets båndbreddekrav: For højdynamiske opgaver som robotbaseret materialehåndtering er ventiler med en respons tid på under 10 ms og tilstrækkelig flowkapacitet afgørende. Følgende ramme vejleder valget:
| Komponent | Nøgleparameter for dimensionering | Overvejelse af driftscyklus |
|---|---|---|
| Pumpe | Flowhastighed ved maksimalt tryk | Kontinuerlig versus diskontinuerlig effekt |
| Cylindre | Kraft/støjlængde ved maksimal hastighed | Tætningsslidage under cyklisk belastning |
| Akkumulator | Væskevolumen til spidsbelastningsabsorption | Vedligeholdelse af fortrykk |
| Servoventil | Båndbredde versus systemrespons | Varmeafledning under cykling |
Transducerns opløsning, styreenhedens prøvetagningsfrekvens og realtidsjustering til præcisionsbevægelsesstyring
Styring af bevægelse på mikronniveau kræver proportional troværdighed i hele signalkæden. Transducerens opløsning skal overstige den ønskede nøjagtighed med mindst 5× – så kræver en positions tolerance på ±5 μm en sensoropløsning på maks. 1 μm. Styringsenhedens samplingfrekvens skal være 5–10× systemets effektive båndbredde for at undgå aliasing og faseforsinkelse; for et system med en båndbredde på 100 Hz er derfor en samplingfrekvens på 500–1000 Hz påkrævet. Realtime-justering – ved brug af adaptive PID-algoritmer – justerer dynamisk forstærkningen som respons på ændringer i friktion, belastning eller temperatur og reducerer indsvingningstiden med 40 % i miljøer med variable betingelser. Vibrationsanalyse under igangsættelse hjælper med at identificere og dæmpe mekaniske resonanser, hvilket sikrer stabil og jitterfri bevægelse over hele det driftsmæssige område.

Ofte stillede spørgsmål
Hvad er de vigtigste komponenter i et servohydraulisk system?
De vigtigste komponenter i et servohydraulisk system er strømforsyningsenheden, servoventilen, aktuatoren og feedback-sensoren.
Hvordan opnår et servohydraulisk system høj positionsnøjagtighed?
Systemet opnår høj positionsnøjagtighed gennem realtidsfeedback og lukketløbskorrektion, der kompenserer for termisk drift, deformationselasticitet og lastbetinget afbøjning.
Hvad er nogle energieffektivitetsstrategier i servohydrauliske systemer?
Energieffektivitetsstrategier omfatter regenerativkredsløb, lastfølsomme pumper, kompakte varmevekslere og variabelhastighedsdrev.
Hvordan integreres IIoT og smarte diagnostiksystemer i moderne servohydrauliske systemer?
IIoT og smarte diagnostiksystemer integreres via indbyggede sensorer og realtids-telemetri, der muliggør forudsigende vedligeholdelse og optimering af systemets ydeevne.
Hvad er vigtigt for dimensionering af komponenter i industrielle servohydrauliske anvendelser?
Komponentdimensioneringen skal tage højde for applikationens lastprofil og driftscyklus, idet der skal findes en balance mellem ydeevne, effektivitet og levetid.
Indholdsfortegnelse
- Grundlæggende arkitektur for et servohydraulisk system
- Kritiske designkrav for højtydende servo-hydrauliske systemer
- IIoT-klar integration og intelligent diagnostik i moderne servo-hydrauliske systemer
- Bedste praksis for dimensionering og valg af komponenter til industrielle servo-hydrauliske applikationer
-
Ofte stillede spørgsmål
- Hvad er de vigtigste komponenter i et servohydraulisk system?
- Hvordan opnår et servohydraulisk system høj positionsnøjagtighed?
- Hvad er nogle energieffektivitetsstrategier i servohydrauliske systemer?
- Hvordan integreres IIoT og smarte diagnostiksystemer i moderne servohydrauliske systemer?
- Hvad er vigtigt for dimensionering af komponenter i industrielle servohydrauliske anvendelser?