Arquitectura fundamental de un sistema hidráulico servocontrolado
Unidad de potencia integrada, válvula servocontrolada, actuador y disposición del sensor de retroalimentación
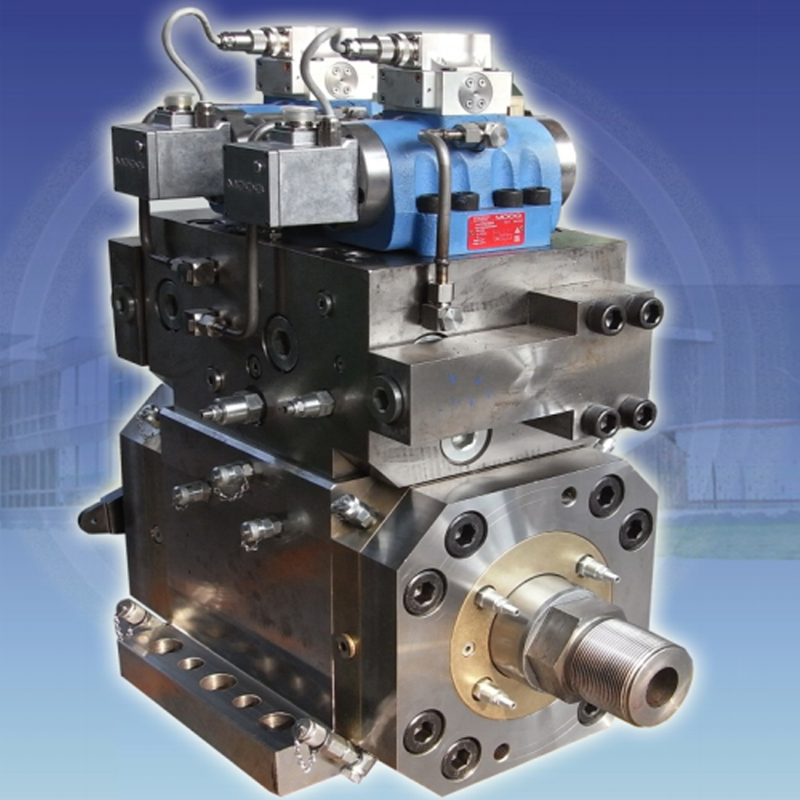
La arquitectura central de un sistema hidráulico servo integra cuatro componentes interdependientes: la unidad de potencia, la válvula servo, el actuador y el sensor de retroalimentación. La unidad de potencia —normalmente una bomba de desplazamiento variable accionada por un motor— genera fluido hidráulico presurizado y controlado. La válvula servo, que actúa como traductor electrohidráulico, modula con precisión la dirección y el volumen del caudal en respuesta a señales electrónicas de control. Este fluido regulado acciona el actuador (cilindro o motor rotativo), convirtiendo la energía hidráulica en movimiento mecánico de alta fuerza y alta precisión. La retroalimentación en tiempo real de posición, velocidad o fuerza la proporcionan sensores como los transformadores diferenciales variables lineales (LVDT) o codificadores ópticos de alta resolución, lo que permite correcciones en bucle cerrado con repetibilidad inferior al milímetro. En aplicaciones como el estampado preciso de metales, esta arquitectura logra una precisión posicional de ±0,1 mm mediante la compensación continua de la deriva térmica, la deformabilidad y la desviación inducida por la carga.
Flujo de señal desde la entrada de comando hasta la salida de fuerza/posición: La interfaz electrohidráulica
La secuencia de control comienza con una señal de comando, normalmente un voltaje o un punto de consigna digital procedente de un PLC o un controlador de movimiento, que se traduce en un desplazamiento del émbolo dentro de la válvula servo. Esta acción dirige el fluido presurizado a la cámara correspondiente del actuador, generando la diferencia de presión necesaria para el movimiento. A medida que el actuador se desplaza, los sensores de retroalimentación transmiten al controlador los datos reales de posición o fuerza, lo que permite calcular el error y emitir una salida correctiva. La estabilidad depende de una calibración precisa: por ejemplo, una zona muerta no corregida en la válvula puede inducir oscilaciones superiores a ±2 % del valor de consigna en sistemas de alta inercia. Aunque la compresibilidad del fluido y la inercia mecánica limitan intrínsecamente el ancho de banda, los controladores modernos emplean algoritmos predictivos —incluyendo la programación adaptativa de ganancia— para mantener la estabilidad durante transiciones rápidas de carga del 0 al 100 % sin sacrificar la fidelidad de la respuesta.

Factores críticos de diseño para sistemas servo hidráulicos de alto rendimiento
Respuesta dinámica, limitaciones de ancho de banda y requisitos de estabilidad en bucle cerrado
Los sistemas hidráulicos servo de alto rendimiento se definen mediante tres imperativos de diseño estrechamente acoplados: velocidad de respuesta dinámica, ancho de banda utilizable y estabilidad en bucle cerrado. El ancho de banda —la frecuencia a la que la ganancia del sistema disminuye 3 dB— suele estar limitado a 15–30 Hz en aplicaciones industriales de alta inercia debido a la resonancia hidráulica, la compresibilidad del fluido y la dinámica de la válvula/actuador. Superar estos límites conlleva riesgos de retardo de fase, sobrepico e inestabilidad; en prensas de forja, un sobrepico ≥5 % puede comprometer la integridad de la pieza o dañar las herramientas. Los diseños más avanzados abordan este problema mediante una modelización rigurosa de la propagación de ondas de presión y de los modos resonantes, combinada con estrategias de control avanzadas. Por ejemplo, la programación adaptativa de ganancia reduce el sobrepico un 40 % en comparación con un PID de parámetros fijos, manteniendo una latencia de control <1 ms, lo que permite un rendimiento robusto ante cargas y velocidades variables.
Estrategias de eficiencia energética: circuitos regenerativos, detección de carga y disipación de calor
La eficiencia energética ya no es secundaria: es fundamental para la viabilidad del sistema. Los circuitos de recuperación regenerativa aprovechan la energía inercial durante la desaceleración, redirigiendo hasta el 65 % de la potencia que, de otro modo, se disiparía de vuelta al sistema. Las bombas con detección de carga ajustan dinámicamente el caudal y la presión a la demanda real en tiempo real de los actuadores, eliminando así las pérdidas innecesarias por estrangulamiento. La gestión térmica es igualmente crítica: intercambiadores de calor compactos, combinados con volúmenes optimizados de aceite, reducen la carga térmica en un 30 %; los accionamientos de velocidad variable reducen el consumo energético en vacío de las bombas en un 55 % frente a las unidades de desplazamiento fijo; y los diseños inteligentes de cilindros —con conductos internos que favorecen el flujo laminar— minimizan las pérdidas viscosas. Conjuntamente, estas estrategias permiten lograr ahorros energéticos de hasta el 70 % en todo el sistema, manteniendo al mismo tiempo la estabilidad térmica conforme a la norma ISO 4413 y la integridad a largo plazo del fluido.
Integración lista para IIoT y diagnóstico inteligente en sistemas hidráulicos servo modernos
Los modernos sistemas hidráulicos servo incorporan capacidades del Internet Industrial de las Cosas (IIoT) para transformar el mantenimiento reactivo en una operación proactiva y basada en datos. Sensores integrados de presión, temperatura, caudal y vibración envían telemetría en tiempo real a procesadores de borde, donde algoritmos predictivos identifican anomalías en etapas iniciales —por ejemplo, desgaste del émbolo de válvula o pérdida de gas en los acumuladores— antes de que se conviertan en fallos. Los paneles de control conectados a la nube permiten el monitoreo remoto del estado y el diagnóstico, reduciendo el tiempo de inactividad no planificado hasta en un 45 %. El análisis avanzado correlaciona flujos de datos procedentes de múltiples sensores para optimizar el consumo energético, detectar desviaciones sutiles en los perfiles de movimiento e incluso ajustar automáticamente los parámetros de control; por ejemplo, adaptando las curvas de respuesta de las válvulas según los cambios de viscosidad del fluido medidos in situ. Esta convergencia entre inteligencia de borde y actuación hidráulica posibilita un mantenimiento basado en el estado, prolongando la vida útil de los componentes y manteniendo un rendimiento preciso durante ciclos de trabajo exigentes.
Buenas prácticas para el dimensionamiento y la selección de componentes en aplicaciones industriales de servohidráulica
Dimensionamiento de bomba, cilindro, acumulador y válvula proporcional-servoválvula basado en el perfil de carga y el ciclo de trabajo
El dimensionamiento óptimo de los componentes equilibra el rendimiento, la eficiencia y la durabilidad, y debe basarse en el perfil real de carga y el ciclo de trabajo de la aplicación. Las bombas deben suministrar el caudal máximo a la presión requerida sin una sobrecapacidad crónica; un dimensionamiento insuficiente provoca la caída de presión bajo carga, mientras que un dimensionamiento excesivo incrementa el calor, el ruido y el desperdicio de energía. Los acumuladores, dimensionados para la absorción de picos y la recuperación de energía, pueden reducirse hasta un 30 % en aplicaciones de servicio intermitente frente al funcionamiento continuo. El diámetro y la carrera del cilindro se determinan según los requisitos de fuerza y velocidad, seleccionándose cuidadosamente el diámetro del vástago para evitar pandeo bajo cargas de compresión. Las válvulas servo deben satisfacer las exigencias de ancho de banda del sistema: para tareas de alta dinámica, como la manipulación robótica de materiales, son esenciales válvulas con un tiempo de respuesta inferior a 10 ms y una capacidad de caudal suficiente. El siguiente marco guía la selección:
| Componente | Factor clave de dimensionamiento | Consideración del ciclo de trabajo |
|---|---|---|
| Bomba | Caudal a presión máxima | Potencia continua frente a potencia intermitente |
| Cilindro | Fuerza/longitud de carrera a velocidad máxima | Desgaste del sello bajo carga cíclica |
| Acumulador | Volumen de fluido para absorción de sobrepresiones | Mantenimiento de la presión de precarga |
| Servovalvula | Ancho de banda frente a la respuesta del sistema | Disipación de calor durante el ciclo |
Resolución del transductor, frecuencia de muestreo del controlador y ajuste en tiempo real para un control de movimiento de precisión
El control de movimiento a nivel micrométrico exige fidelidad proporcional en toda la cadena de señales. La resolución del transductor debe superar la precisión objetivo al menos por un factor de 5×; así, una tolerancia posicional de ±5 μm requiere una resolución del sensor de ≤1 μm. Las tasas de muestreo del controlador deben ser de 5 a 10 veces el ancho de banda efectivo del sistema para evitar el aliasing y el retardo de fase; para un sistema con un ancho de banda de 100 Hz, es obligatorio un muestreo de 500–1000 Hz. El ajuste en tiempo real —mediante algoritmos PID adaptativos— modifica dinámicamente las ganancias en respuesta a cambios en la fricción, la carga o la temperatura, reduciendo el tiempo de estabilización en un 40 % en entornos con condiciones variables. El análisis de vibraciones durante la puesta en servicio ayuda a identificar y suprimir resonancias mecánicas, garantizando un movimiento estable y libre de jitter en todo el rango operativo.

Preguntas frecuentes
¿Cuáles son los componentes principales de un sistema hidráulico servo?
Los componentes principales de un sistema hidráulico servo son la unidad de potencia, la válvula servo, el actuador y el sensor de retroalimentación.
¿Cómo logra un sistema hidráulico servo una alta precisión posicional?
El sistema logra una alta precisión posicional mediante retroalimentación en tiempo real y corrección en bucle cerrado que compensa la deriva térmica, la deformabilidad y la desviación inducida por la carga.
¿Cuáles son algunas estrategias de eficiencia energética en los sistemas hidráulicos servo?
Las estrategias de eficiencia energética incluyen circuitos regenerativos, bombas con detección de carga, intercambiadores de calor compactos y variadores de velocidad.
¿Cómo se integran la IIoT y los diagnósticos inteligentes en los sistemas hidráulicos servo modernos?
La IIoT y los diagnósticos inteligentes se integran mediante sensores integrados y telemetría en tiempo real que permiten el mantenimiento predictivo y optimizan el rendimiento del sistema.
¿Qué es importante para el dimensionamiento de componentes en aplicaciones industriales hidráulicas servo?
El dimensionamiento de los componentes debe tener en cuenta el perfil de carga y el ciclo de trabajo de la aplicación, equilibrando rendimiento, eficiencia y durabilidad.
Tabla de contenidos
- Arquitectura fundamental de un sistema hidráulico servocontrolado
- Factores críticos de diseño para sistemas servo hidráulicos de alto rendimiento
- Integración lista para IIoT y diagnóstico inteligente en sistemas hidráulicos servo modernos
- Buenas prácticas para el dimensionamiento y la selección de componentes en aplicaciones industriales de servohidráulica
-
Preguntas frecuentes
- ¿Cuáles son los componentes principales de un sistema hidráulico servo?
- ¿Cómo logra un sistema hidráulico servo una alta precisión posicional?
- ¿Cuáles son algunas estrategias de eficiencia energética en los sistemas hidráulicos servo?
- ¿Cómo se integran la IIoT y los diagnósticos inteligentes en los sistemas hidráulicos servo modernos?
- ¿Qué es importante para el dimensionamiento de componentes en aplicaciones industriales hidráulicas servo?