सर्वो हाइड्रॉलिक प्रणाली का आधारभूत वास्तुकला
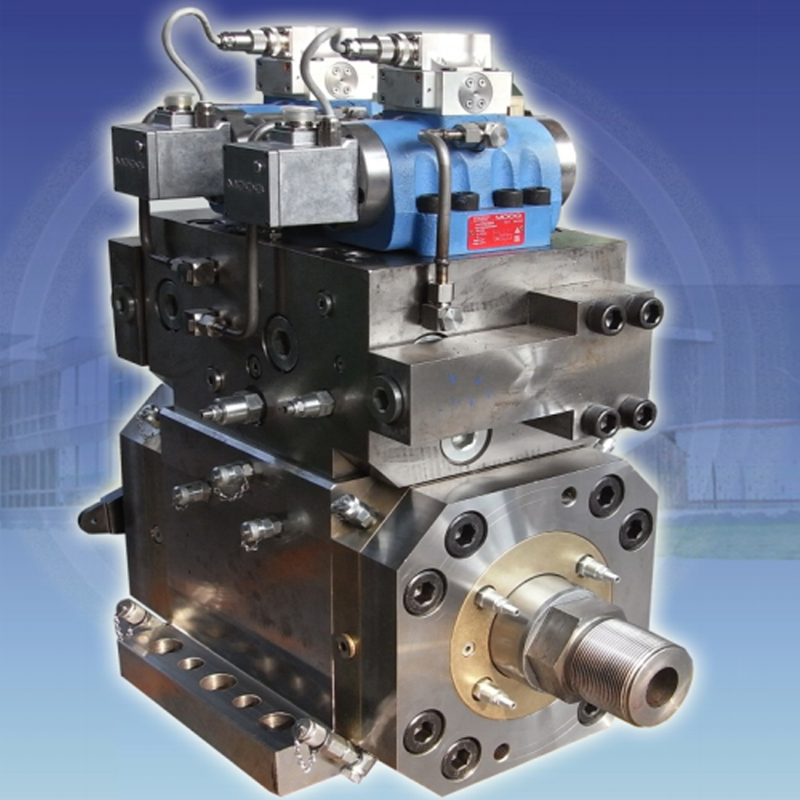
एकीकृत पावर यूनिट, सर्वो वाल्व, एक्चुएटर और फीडबैक सेंसर लेआउट
एक सर्वो हाइड्रॉलिक प्रणाली की मुख्य वास्तुकला में चार अंतर्निर्भर घटकों—पावर यूनिट, सर्वो वाल्व, एक्चुएटर और प्रतिक्रिया सेंसर—का एकीकरण शामिल है। पावर यूनिट—जो आमतौर पर एक मोटर द्वारा संचालित परिवर्तनशील-विस्थापन पंप होता है—नियंत्रित, दबाव युक्त हाइड्रॉलिक द्रव उत्पन्न करता है। सर्वो वाल्व, जो इलेक्ट्रो-हाइड्रॉलिक अनुवादक के रूप में कार्य करता है, इलेक्ट्रॉनिक नियंत्रण संकेतों के अनुसार प्रवाह की दिशा और मात्रा को सटीक रूप से नियंत्रित करता है। यह नियंत्रित द्रव एक्चुएटर (सिलेंडर या घूर्णी मोटर) को चालित करता है, जो हाइड्रॉलिक ऊर्जा को उच्च-बल और उच्च-सटीकता वाली यांत्रिक गति में परिवर्तित करता है। रैखिक परिवर्तनशील अंतर ट्रांसफॉर्मर (LVDT) या उच्च-रिज़ॉल्यूशन ऑप्टिकल एन्कोडर जैसे सेंसर वास्तविक समय में स्थिति, वेग या बल की प्रतिक्रिया प्रदान करते हैं—जिससे सब-मिलीमीटर दोहराव के साथ बंद-लूप सुधार संभव हो जाता है। सटीक धातु स्टैम्पिंग जैसे अनुप्रयोगों में, यह वास्तुकला तापीय ड्रिफ्ट, अनुपालन और भार-प्रेरित विक्षेपण के लगातार क्षतिपूर्ति के माध्यम से ±0.1 मिमी स्थिति सटीकता प्राप्त करती है।
कमांड इनपुट से बल/स्थिति आउटपुट तक सिग्नल प्रवाह: इलेक्ट्रो-हाइड्रोलिक इंटरफ़ेस
नियंत्रण क्रम एक कमांड सिग्नल के साथ शुरू होता है—आमतौर पर एक PLC या मोशन कंट्रोलर से वोल्टेज या डिजिटल सेटपॉइंट—जिसे सर्वो वाल्व के अंदर स्पूल विस्थापन में अनुवादित किया जाता है। यह कार्य दबाव वाले तरल को उचित एक्चुएटर कक्ष में निर्देशित करता है, जिससे गति के लिए आवश्यक दाब अंतर उत्पन्न होता है। जैसे ही एक्चुएटर गति करता है, प्रतिक्रिया सेंसर वास्तविक स्थिति या बल के आंकड़े कंट्रोलर को संचारित करते हैं, जो त्रुटि की गणना करता है और सुधारात्मक आउटपुट जारी करता है। स्थिरता सटीक कैलिब्रेशन पर निर्भर करती है: उदाहरण के लिए, असंशोधित वाल्व डेडबैंड उच्च जड़त्व वाली प्रणालियों में सेटपॉइंट के ±2% से अधिक दोलन उत्पन्न कर सकता है। यद्यपि तरल संपीड़नशीलता और यांत्रिक जड़त्व स्वतः ही बैंडविड्थ की सीमा निर्धारित करते हैं, आधुनिक कंट्रोलर भविष्यवाणी आधारित एल्गोरिदम—जिनमें अनुकूली गेन शेड्यूलिंग शामिल है—का उपयोग करते हैं ताकि 0–100% लोड संक्रमण के दौरान स्थिरता बनाए रखी जा सके, बिना प्रतिक्रिया की शुद्धता को कम किए।

उच्च प्रदर्शन वाले सर्वो हाइड्रॉलिक प्रणालियों के लिए महत्वपूर्ण डिज़ाइन ड्राइवर्स
गतिशील प्रतिक्रिया, बैंडविड्थ सीमाएँ, और क्लोज़्ड-लूप स्थिरता आवश्यकताएँ
उच्च-प्रदर्शन वाले सर्वो हाइड्रॉलिक प्रणालियों को तीन दृढ़ता से जुड़े डिज़ाइन आवश्यकताओं—गतिशील प्रतिक्रिया की गति, उपयोगी बैंडविड्थ और बंद-लूप स्थिरता—द्वारा परिभाषित किया जाता है। बैंडविड्थ—जो आवृत्ति है जिस पर प्रणाली का लाभ 3 डीबी तक कम हो जाता है—आमतौर पर उच्च-जड़त्व वाले औद्योगिक अनुप्रयोगों में हाइड्रॉलिक अनुनाद, द्रव संपीड़नशीलता और वाल्व/एक्चुएटर गतिशीलता के कारण 15–30 हर्ट्ज़ तक सीमित रहती है। इन सीमाओं को पार करने से फ़ेज़ लैग, ओवरशूट और अस्थिरता का ख़तरा होता है; फ़ोर्जिंग प्रेस में, 5% या अधिक का ओवरशूट भाग की अखंडता को समाप्त कर सकता है या औज़ारों को क्षति पहुँचा सकता है। शीर्ष-स्तरीय डिज़ाइन इस समस्या का समाधान दबाव तरंग प्रसार और अनुनादी विधाओं के कठोर मॉडलिंग के साथ-साथ उन्नत नियंत्रण रणनीतियों के माध्यम से करते हैं। उदाहरण के लिए, अनुकूली गेन शेड्यूलिंग, स्थिर-पैरामीटर PID की तुलना में ओवरशूट को 40% तक कम कर देती है, जबकि नियंत्रण विलंबता <1 मिलीसेकंड बनी रहती है—जिससे विभिन्न भारों और गतियों के दौरान भी विश्वसनीय प्रदर्शन सुनिश्चित होता है।
ऊर्जा दक्षता के रणनीतियाँ: पुनर्जनित परिपथ, लोड-संवेदन और ऊष्मा विसरण
ऊर्जा दक्षता अब पूरक नहीं रही है—यह प्रणाली की कार्यक्षमता के लिए अनिवार्य हो गई है। पुनर्जनित परिपथ मंदन के दौरान जड़त्वीय ऊर्जा को पुनः प्राप्त करते हैं, जिससे अन्यथा व्यर्थ हो जाने वाली शक्ति का लगभग 65% भाग प्रणाली में पुनः प्रवाहित किया जा सकता है। लोड-संवेदी पंप वास्तविक समय में एक्चुएटर की मांग के अनुसार प्रवाह और दाब को गतिशील रूप से समायोजित करते हैं, जिससे अपव्ययकारी थ्रॉटलिंग हानियाँ समाप्त हो जाती हैं। तापीय प्रबंधन भी उतना ही महत्वपूर्ण है: संकुचित हीट एक्सचेंजरों को अनुकूलित तेल मात्रा के साथ जोड़ा गया है, जिससे तापीय भार में 30% की कमी आती है; चर-गति ड्राइव्स पंप की निष्क्रिय ऊर्जा खपत को स्थिर-विस्थापन इकाइयों की तुलना में 55% तक कम कर देते हैं; और बुद्धिमान सिलेंडर डिज़ाइन—जिनमें लैमिनर-प्रवाह आंतरिक पैसेज होते हैं—श्यान हानियों को न्यूनतम करते हैं। इन रणनीतियों के समन्वित प्रयोग से पूरी प्रणाली में ऊर्जा बचत लगभग 70% तक प्राप्त की जा सकती है, जबकि ISO 4413-अनुपालनकारी तापीय स्थिरता और दीर्घकालिक द्रव अखंडता बनाए रखी जाती है।
आधुनिक सर्वो हाइड्रोलिक प्रणालियों में IIoT-तैयार एकीकरण और स्मार्ट नैदानिक क्षमताएँ
आधुनिक सर्वो हाइड्रॉलिक प्रणालियाँ औद्योगिक इंटरनेट ऑफ थिंग्स (IIoT) क्षमताओं को एम्बेड करती हैं, जिससे प्रतिक्रियाशील रखरखाव को पूर्वानुमानात्मक, डेटा-आधारित संचालन में परिवर्तित किया जा सकता है। ऑनबोर्ड दाब, तापमान, प्रवाह और कंपन सेंसर वास्तविक समय के टेलीमेट्री डेटा को एज प्रोसेसर्स पर भेजते हैं, जहाँ भविष्यवाणी आधारित एल्गोरिदम शुरुआती चरण की अनियमितताओं—जैसे वाल्व स्पूल का क्षरण या एक्यूमुलेटर में गैस की हानि—का पता लगाते हैं, जिससे उनके विफलता में परिवर्तित होने से पहले ही समय रहते हस्तक्षेप किया जा सकता है। क्लाउड-कनेक्टेड डैशबोर्ड्स दूरस्थ स्वास्थ्य निगरानी और नैदानिक विश्लेषण को सक्षम करते हैं, जिससे अनपेक्षित अवरोध का समय अधिकतम 45% तक कम किया जा सकता है। उन्नत विश्लेषण बहु-सेंसर डेटा स्ट्रीम्स को सहसंबद्ध करते हैं ताकि ऊर्जा के उपयोग को अनुकूलित किया जा सके, गति प्रोफाइल में सूक्ष्म विचलनों का पता लगाया जा सके और यहाँ तक कि नियंत्रण पैरामीटर्स को स्वतः-ट्यून किया जा सके—उदाहरण के लिए, स्थान पर मापी गई द्रव श्यानता में परिवर्तन के आधार पर वाल्व प्रतिक्रिया वक्रों को समायोजित करना। एज बुद्धिमत्ता और हाइड्रॉलिक एक्चुएशन का यह संगम स्थिति-आधारित रखरखाव को सक्षम करता है, जिससे घटकों का जीवनकाल बढ़ता है और मांगपूर्ण कार्य चक्रों के दौरान भी सटीक प्रदर्शन बना रहता है।
औद्योगिक सर्वो हाइड्रॉलिक अनुप्रयोगों के लिए घटकों के आकार निर्धारण और चयन के सर्वोत्तम अभ्यास
लोड प्रोफाइल और ड्यूटी साइकिल के आधार पर पंप, सिलेंडर, एक्यूमुलेटर और अनुपातिक-सर्वो वाल्व का आकार निर्धारण
आदर्श घटक आकार निर्धारण प्रदर्शन, दक्षता और दीर्घायु के बीच संतुलन बनाता है—और इसे अनुप्रयोग के वास्तविक लोड प्रोफाइल और ड्यूटी साइकिल के आधार पर निर्धारित किया जाना चाहिए। पंपों को आवश्यक दबाव पर शिखर प्रवाह आपूर्ति करनी चाहिए, बिना लगातार अतिक्षमता के; छोटे आकार के पंप लोड के तहत दबाव पतन का कारण बनते हैं, जबकि बड़े आकार के पंप ऊष्मा, शोर और ऊर्जा के अपव्यय में वृद्धि करते हैं। एक्यूमुलेटर्स को शिखर अवशोषण और ऊर्जा पुनर्प्राप्ति के लिए आकारित किया जाता है, जिन्हें निरंतर संचालन की तुलना में अंतरालिक संचालन (इंटरमिटेंट-ड्यूटी) अनुप्रयोगों में 30% तक कम किया जा सकता है। सिलेंडर बोर और स्ट्रोक को बल और वेग आवश्यकताओं के आधार पर निर्धारित किया जाता है, जबकि रॉड व्यास का चयन संपीड़न भार के तहत विक्षेपण (बकलिंग) को रोकने के लिए सावधानीपूर्ण रूप से किया जाता है। सर्वो वाल्वों को प्रणाली की बैंडविड्थ आवश्यकताओं को पूरा करना चाहिए: रोबोटिक सामग्री हैंडलिंग जैसे उच्च-गतिशील कार्यों के लिए, 10 मिलीसेकंड से कम प्रतिक्रिया समय और पर्याप्त प्रवाह क्षमता वाले वाल्व आवश्यक हैं। निम्नलिखित रूपरेखा चयन के लिए मार्गदर्शन प्रदान करती है:
| घटक | प्रमुख आकार निर्धारण कारक | ड्यूटी साइकिल विचार |
|---|---|---|
| पंप | अधिकतम दबाव पर प्रवाह दर | निरंतर बनाम अंतरालिक शक्ति |
| सिलेंडर | अधिकतम गति पर बल/स्ट्रोक लंबाई | चक्रीय भार के तहत सील का क्षरण |
| बिजली संचयक यंत्र | आकस्मिक दबाव अवशोषण के लिए द्रव आयतन | पूर्व-चार्ज दबाव रखरखाव |
| सर्वो वैल्व | बैंडविड्थ बनाम प्रणाली प्रतिक्रिया | चक्रीय कार्य के दौरान ऊष्मा अपव्यय |
ट्रांसड्यूसर रिज़ॉल्यूशन, कंट्रोलर सैंपलिंग दर और परिशुद्ध गति नियंत्रण के लिए वास्तविक समय ट्यूनिंग
माइक्रॉन-स्तरीय गति नियंत्रण के लिए पूरी सिग्नल चेन में आनुपातिक वफादारी की आवश्यकता होती है। ट्रांसड्यूसर का रिज़ॉल्यूशन लक्ष्य सटीकता से कम से कम 5× अधिक होना चाहिए—इस प्रकार, ±5 μm की स्थिति सहिष्णुता के लिए ≤1 μm का सेंसर रिज़ॉल्यूशन आवश्यक है। कंट्रोलर की सैंपलिंग दर को प्रणाली की प्रभावी बैंडविड्थ की 5–10× होना चाहिए, ताकि एलियासिंग और फेज लैग से बचा जा सके; 100 Hz बैंडविड्थ वाली प्रणाली के लिए 500–1000 Hz की सैंपलिंग अनिवार्य है। वास्तविक समय में ट्यूनिंग—अनुकूली PID एल्गोरिदम का उपयोग करके—घर्षण, भार या तापमान में परिवर्तन के अनुसार लाभों को गतिशील रूप से समायोजित करती है, जिससे परिवर्तनशील परिस्थितियों वाले वातावरण में स्थायीकरण समय में 40% की कमी आती है। उत्पादन शुरू करने के दौरान कंपन विश्लेषण यांत्रिक अनुनादों की पहचान और दबाव करने में सहायता करता है, जिससे पूरे संचालन क्षेत्र में स्थिर, झिंझोड़-मुक्त गति सुनिश्चित होती है।

अक्सर पूछे जाने वाले प्रश्न
सर्वो हाइड्रॉलिक प्रणाली के मुख्य घटक क्या हैं?
सर्वो हाइड्रॉलिक प्रणाली के मुख्य घटक पावर यूनिट, सर्वो वाल्व, एक्चुएटर और प्रतिक्रिया सेंसर हैं।
सर्वो हाइड्रॉलिक प्रणाली उच्च स्थिति सटीकता कैसे प्राप्त करती है?
यह प्रणाली वास्तविक समय में प्रतिक्रिया और बंद-लूप सुधार के माध्यम से उच्च स्थिति सटीकता प्राप्त करती है, जो तापीय विस्थापन, लचीलापन और भार-प्रेरित विक्षेपण की भरपाई करता है।
सर्वो हाइड्रॉलिक प्रणालियों में ऊर्जा दक्षता के कुछ रणनीतियाँ क्या हैं?
ऊर्जा दक्षता की रणनीतियों में पुनर्जनित परिपथ, भार-संवेदन पंप, सघन हीट एक्सचेंजर और परिवर्तनशील-गति ड्राइव शामिल हैं।
आईआईओटी (IIoT) और स्मार्ट नैदानिक प्रणालियाँ आधुनिक सर्वो हाइड्रॉलिक प्रणालियों में कैसे एकीकृत की जाती हैं?
आईआईओटी (IIoT) और स्मार्ट नैदानिक प्रणालियों को ऑनबोर्ड सेंसर और वास्तविक समय के दूरसंचार डेटा के माध्यम से एकीकृत किया जाता है, जो भविष्यानुमानात्मक रखरखाव को सक्षम करता है और प्रणाली के प्रदर्शन को अनुकूलित करता है।
औद्योगिक सर्वो हाइड्रॉलिक अनुप्रयोगों में घटकों के आकार निर्धारण के लिए क्या महत्वपूर्ण है?
घटकों के आकार निर्धारण में अनुप्रयोग के भार प्रोफाइल और कार्य चक्र को ध्यान में रखना चाहिए, जिससे प्रदर्शन, दक्षता और दीर्घायु के बीच संतुलन बनाया जा सके।
विषय-सूची
- सर्वो हाइड्रॉलिक प्रणाली का आधारभूत वास्तुकला
- उच्च प्रदर्शन वाले सर्वो हाइड्रॉलिक प्रणालियों के लिए महत्वपूर्ण डिज़ाइन ड्राइवर्स
- आधुनिक सर्वो हाइड्रोलिक प्रणालियों में IIoT-तैयार एकीकरण और स्मार्ट नैदानिक क्षमताएँ
- औद्योगिक सर्वो हाइड्रॉलिक अनुप्रयोगों के लिए घटकों के आकार निर्धारण और चयन के सर्वोत्तम अभ्यास
-
अक्सर पूछे जाने वाले प्रश्न
- सर्वो हाइड्रॉलिक प्रणाली के मुख्य घटक क्या हैं?
- सर्वो हाइड्रॉलिक प्रणाली उच्च स्थिति सटीकता कैसे प्राप्त करती है?
- सर्वो हाइड्रॉलिक प्रणालियों में ऊर्जा दक्षता के कुछ रणनीतियाँ क्या हैं?
- आईआईओटी (IIoT) और स्मार्ट नैदानिक प्रणालियाँ आधुनिक सर्वो हाइड्रॉलिक प्रणालियों में कैसे एकीकृत की जाती हैं?
- औद्योगिक सर्वो हाइड्रॉलिक अनुप्रयोगों में घटकों के आकार निर्धारण के लिए क्या महत्वपूर्ण है?