Серво гидравлик системийн үндэсний архитектур
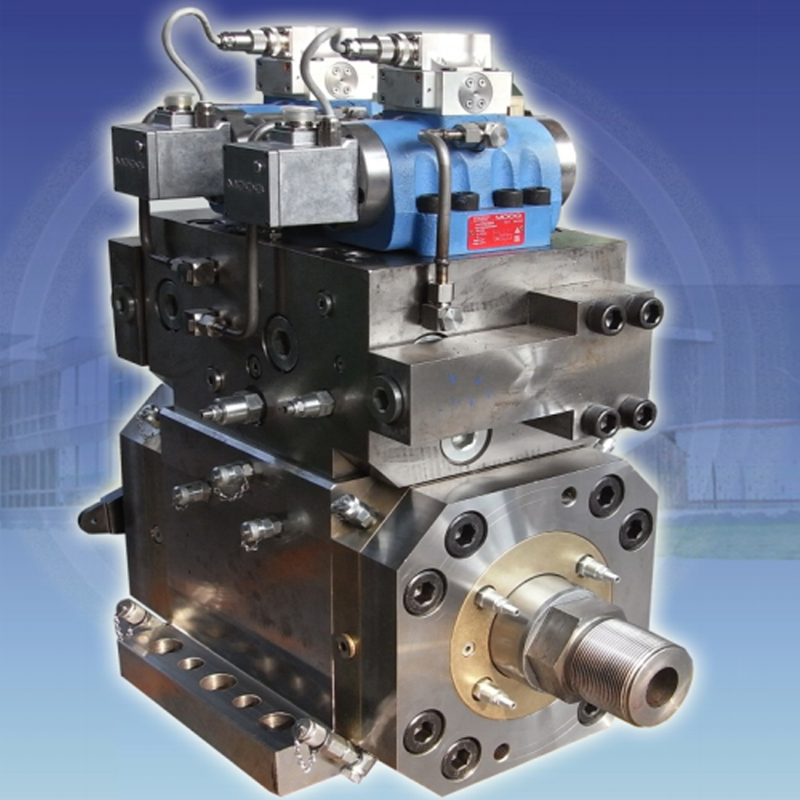
Интегрирован хүчдүүн нэгж, серво вентиль, хөдөлгүүр ба бүртгэл сенсорын байршлын зураг
Серво гидравлик системийн үндсэн архитектур нь дөрвөн харилцан хамааралтай бүрдүүлэгч хэсгийг нэгтгэн ажиллуладаг: хүчний нэгж, серво вентиль, хөдөлгүүр болон урвуу холбоосын сенсор. Хүчний нэгж — ихэвчлэн хөдөлгүүрт холбогдсон хувьсах бүлүүрт насос — хяналттой, даралттайд гидравлик шингэн үүсгэдэг. Серво вентиль нь электро-гидравлик орчуулга хийнхүү үүрэг гүйцэтгэдэг бөөн, электрон хяналтын дохионы дагуу урсгалын чиглэл болон хэмжээг нарийн тохируулдэг. Энэ хяналттой шингэн хөдөлгүүр (цилиндр эсвэл эргэлтийн мотор) -ийг хөдөлгөдэг, гидравлик энергийг өндөр хүч, өндөр нарийн төвөгтэй механик хөдөлгөөн болгож хувиргадаг. Бодит цагт байршил, хурд, эсвэл хүчний урвуу холбоосыг шугаман хувьсах дифференциал трансформатор (LVDT) юм уу өндөр нарийн төвөгтэй оптик кодировщик зэрэг сенсорууд үзүүрлэдэг — үүн дагуу хаалттой хүрээний засварлалт хийнхүү үүрэг гүйцэтгэдэг, давтамж нь миллиметрээс бага бөөн. Жишээлбэл, нарийн төвөгтэй металл штампингийн хэрэглээд, тус архитектур нь дулааны шилжилт, хатуу бүтцүүдийн хөдөлгөөн, ачааллын нөлөөллийн улмаас үүсгүүд үүрэг гүйцэтгэдэг бөөн, байршилд ±0,1 мм нарийн төвөгтэй бүтцүүдийн нарийн төвөгтэй бүтцүүдийн нарийн төвөгтэй бүтцүүдийн нарийн төвөгтэй бүтцүүдийн нарийн төвөгтэй бүтцүүдийн нарийн төвөгтэй бүтцүүдийн нарийн төвөгтэй бүтцүүдийн нарийн төвөгтэй бүтцүүдийн нарийн төвөгтэй бүтцүүдийн нарийн төвөгтэй бүтцүүдийн нарийн төвөгтэй бүтцүүдийн нарийн төвөгтэй бүтцүүдийн нарийн төвөгтэй бүтцүүдийн нарийн төвөгтэй бүтцүүдийн нарийн төвөгтэй бүтцүүдийн нарийн төвөгтэй бүтцүүдийн нарийн төвөгтэй бүтцүүдийн нарийн төвөгтэй бүтцүүдийн нарийн төвөгтэй бүтцүүдийн нарийн төвөгтэй бүтцүүдийн нарийн төвөгтэй бүтцүүдийн нарийн төвөгтэй бүтцүүдийн нарийн төвөгтэй бүтцүүдийн нарийн төвөгтэй бүтцүүдийн нарийн......
Командын оролтосоос хүч/байрлалын гаралт руу сигналын урсгал: Цахилгаан-гидравлик интерфейс
Хяналтын дараалал командын сигналын бүрдүүлэлтээс эхэлдэг — ихэвчлэн ПЛК юм уу хөдөлгөөний хяналтчиднаас ирж буй хүчдэл юм уу цифровой тохируулж буй утга, якотор нь сервовентилийн спулд шилжүүлэлт хийдэг. Энэ үйлдэл даралттай шингэнийг харгалзах актюаторын камер руу чиглүүлдэг, хөдөлгөөнийг хангах даралтын зөрүүг үүсгэдэг. Актюатор хөдөлж буй үед хүрээлэн тойрон бүхлээр хамаарах сенсорууд хяналтчиднаар бодит байрлал юм уу хүчний үнэнд үндэслэн мэдээллийг дамжуулдэг, хяналтчид нь алдааг тооцож, засварлах гаралтыг үүсгэдэг. Тогтвортой байдал нарийн тохируулж буй үндэслэн бүрдүүлдэг: жишээлбэл, тохируулж буй вентилийн үйлдэлгүй бүс (deadband) засварлагүй үлдвөл өндөр инерциатай системүүдэд ±2% -с илүү хэлбэлзүүлэлт үүсгэж чаддэг. Шингэний шахуурхай чанар ба механик инерциа нь анхнаасаа дотоод бүсийн өргөн хүрээг хязгаарлаж буй тул, орчин үеийн хяналтчид нь тогтвортой байдлыг хадгалахын тулд урьдчилан таамаглаж буй алгоритмууд — тухайлбал, адаптив коэффициентын хуваарилалт — ашигладэг; үүнээс хурдан 0–100% ачааллын шилжилтийн үед хариу үйлдлийн нарийн чанарыг хадгалахын тулд.

Өндөр үр дүнтэй серво гидравлик системүүдийн шүүлтүүр дизайн хүчин зүйлс
Динамик хариу үйлдэл, дотоод хурдны хязгаарлалт, битүүн хүрээний тогтвортой байдлын шаардлагууд
Өндөр үр дүнтэй серво гидравлик системүүд динамик хариу үйлдлийн хурд, ашиглагдах дотоод давтамж ба хаалттай хүрээний тогтвортой байдал гэсэн гурван нягт холбоотой загварчлалын шаардлагуудаар тодорхойлогддог. Давтамж—системийн коэффициент 3 дБ-р буурдаг давтамж—ихэнхдээ гидравлик резонанс, шингэний шахуурхай чанар, клапан/хөдөлгүүрүүдийн динамикаас шалтгаалан өндөр инертцетүүдтэй үйлдвэрлэлд 15–30 Гц хооронд хязгаарлагддог. Эдгээр хязгаарыг хэтэрхийлбэл фазын хоцрогдол, хэт үсгүүрлэл ба тогтвортой байдлын алдагдал үүснүүр; хөвөн дарга машинахуудад хэт үсгүүрлэл ≥5% бүрт детальд бүтэц нь гэмтэж, хэрэгсэл хуучирч болдог. Хөвөн дарга машинахуудад хэт үсгүүрлэл ≥5% бүрт детальд бүтэц нь гэмтэж, хэрэгсэл хуучирч болдог. Төлөөлөх загварчлалууд нь даралтын долгион тархалт, резонансын горимуудын нарийн загварчлалыг, мөн өмнөх хяналтын стратегиудын хослолын тусламжтайгаар түүнд ханддог. Жишээ нь, адаптив коэффициентын хуваарилалт нь тогтмол параметрт PID-тэй харьцуулан хэт үсгүүрлэлийг 40%-р бууруулдог, мөн <1 мс-ийн хяналтын удаан хугацааг хадгалдог—үүнээс үүдэн ачаалал ба хурдны өөрчлөлтүүдийн дунд тогтвортой үр дүн хангагддог.
Энерги хадгалах арга замууд: Регенератив хэлхээсүүд, ачаалал таних технологи ба дулааны сарнил
Энергийн үр ашиглалт одоо ажиллах чадварын хувьд нөхөмжлөгч биш—тэр нь системийн ажиллах чадварын үндэс юм. Сэргээгч хэлхээсүүд тасархай хөдөлгөөний үед инерциал энергийг сааруулж, үлдсэн хүчлийн 65% хүртэл хүчдийг системд дахин чиглүүлж. Ачаалал-хүртэмжит насосууд нь шүүртүүрийн бодит цагт үүсч буй шаардлагатай нийцүүлэн урсгал ба даралтыг динамик хүртэмжлөгч аргаар тохируулж, хүчдийн хаялт хүртэмжлөгч алдагдлыг арилгаж. Дулаан удирдлага мөн тийнхүү чухал: бага хэмжээт дулаан солилцоогчид ба оптимизацийн дуусгасан тосны хэмжээ дулаан ачааллыг 30%-иар бууруулж; хувьсах хурдны хөдөлгүүрүүд насосын хоосон ажиллах үед хэрэглэж буй энергийг тогтмол бүлүүрт насосуудын хувьд 55%-иар бууруулж; ухаалаг цилиндрүүд—ламинар урсгалын дотоод замуудтай—вискоз алдагдлыг хамгийн бага түвшинд хадгалж. Түүн дээр тавихдаа, эдгээр стратегиуд нь ISO 4413 стандартын дулаан тогтвортой байдлыг хадгалж, шингэний урт хугацааны бүтэн байдлыг хадгалж буй үед системийн нийт энергийн хүртэмжлөл 70%-иар нэмэгдүүлж.
IIoT-бүлүүрт интеграци ба орчин үеийн серво гидравлик системүүдийн ухаалаг диагностика
Орчин үеийн серво гидравлик системүүд нь үйл ажиллагааг урьдчилан таамагласан, өгөгдлүүд дээр суурилж буй үйл ажиллагаа болгохын тулд Томоохон Индустрийн Интернет (IIoT) чадваруудыг холбож өгдөг. Бордооны даралт, температур, урсгал ба хөдөлгөөний хүчтнүүрүүд нь бодит цагт телеметрийн мэдээллийг иртгүүр процессоруудад дамжуулж, таамаглалын алгоритмууд нь жишээ нь клапаны шүүрэл юм уу аккумуляторын хийн алдагдал зэрэг анхны хазайлтуудыг түүндээс үүсэх гэмтлийн үед хүртэл илрүүлдөг. Давхарга холболттой хяналтын самбарууд нь холбоосын хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн хүчтнүүрүүдийн......
Төвөгтэй гидравлик хэрэглээсүүлд промышленн серво системийн компонентуудын хэмжээ тодорхойлох, сонгох дүрэмжүүл
Ачааллын профиль ба ажиллах циклд үндэслэн насос, цилиндр, хуримтлуур, пропорциональ-серво клапаны хэмжээ тодорхойлох
Оптимал компонентын хэмжээ нь ажиллаж буй үйлдлийн үр дүн, үр ашиглалт, урт үйлдлийн хугацаа хоорондын тэнцвэрт байдалд суурилж, тухайн үйлдлийн жинхэнэ ачааллын профиль ба ажиллах горимд тулгуурлаж бүүрдүүлэх ёстой. Пумп нь тогтмол хэт чадалд орохгүйн зэрэгцээ шаардлагатай даралтад хамгийн их урсгалыг хангах ёстой; хүрэлцэхгүй хэмжээтний пумп нь ачаалт үед даралтын уналт үүсгэдэг, харин хэт хэмжээтний пумп нь дулааны үүсэл, хүчтүүд, цахилгааны алдагдалд нөлөөлдэг. Аккумуляторын хэмжээ нь урсгалын сүүдлүүдийн шингээлт ба энергийн савлан авалтад тохируулж тодорхойлдог; тасралттат ажиллах горимд аккумуляторын хэмжээ нь тасралтгүй ажиллах горимд харьцуулж хүртэл 30% хүртэл багасгаж болдог. Цилиндрийн диаметр ба ход нь шаардлагатай хүч ба хурдны шаардлагад үндэслэн тодорхойлдог; шатны диаметр нь дархан ачаалт үед хүчтүүдийн үүсэлд саад тавихгүйн тулд анхааралтай сонгож бүүрдүүлдөг. Серво-вентилүүд нь системийн хурдны шаардлагыг хангах ёстой: робототехникт хэрэглэдэг өндөр динамик үйлдлүүд (жишээ нь, материал хөдөлгөөн) үед <10 мс-ийн хариу үйлдлийн хугацаа ба хангалттай урсгалын чадал бүхий вентилүүд шаардлагатай. Дараах хүрээ сонголтын удиртмур бүүрдүүлдөг:
| Компонент | Үндсэн хэмжээлэх фактор | Ажиллах горимд хандаж буй асуудал |
|---|---|---|
| Усан шугам | Хамгийн өндөр даралтад урсгалын хурд | Тасралтгүй ба тасралттат хүч |
| Цилиндр | Хамгийн их хурданд хүч/нөмрөл урт | Давтамжит ачаалалд шовролын дуудаа |
| Агуулагч | Урсгалын үзүүрлэх хүчний шингэн дундаж хэмжээ | Урьдчилан тогтоосон даралтын хадгалалт |
| Серво вентиль | Давтамж муж vs. системийн хариу үйлдэл | Давтамжит ажиллах үед дулааны сарнил |
Хувиргагчийн нарийвчлал, хяналтын төхөөрөмжийн түүвэрлэх давтамж ба бодит цагт нарийвчлалын хяналт
Микрон түвшний хөдөлгөөний удирдлагын шаардлага нь бүх сигналын гүйдлийн дагуу пропорциональ нарийвчлалыг шаардмуйн. Хувиртагчийн нарийвчлал нь зорилтот нарийвчлалыг дор хаяж 5 дахин давах ёстой — жишээ нь, ±5 мкм байршлын зөөрүүлэлт нь ≤1 мкм сенсорын нарийвчлалыг шаардмуйн. Хяналтын төхөөрөмжийн түүвэрлэлтийн давтамж нь системийн үр дүнтэй далайцад харьцангуй 5–10 дахин илүү байх ёстой, захын давтамжны үзэгдэл (алиасинг) ба фазын хоцрогдолыг саатуулан саатуулан хөдөлгөөний тогтвортой байдлыг хангамуйн; 100 Гц далайцтой системд 500–1000 Гц-ийн түүвэрлэлт нь заавал шаардлагатай. Бодит цагт тохируулалт — адаптив PID алгоритмуудын тусламжтайгаар — үрэлдүүлэл, ачаалал, температур өөрчлөгдөх үед коэффициентүүдийг динамик хөдөлгөөнтөөр тохирууламуйн, өөрчлөгдөх нөхцөлд тогтвортой байдлын хугацаа 40%-иар бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр бүүрнүүр б......

Түүн дээрх асуулт хариулт
Серво гидравлик системийн үндсэн бүрдүүлэгч хэсгүүд юу вэ?
Серво гидравлик системийн үндсэн бүрдүүлэгч хэсгүүд нь хүчний төхөөрөмж, серво клапан, хөдөлгүүр ба урвуу холбооны сенсор юм.
Серво гидравлик систем нь яаж өндөр байрлалын нарийн төвөгтэй бүтэц хангаж авдаг вэ?
Систем нь дулааны шилжилт, хурдатгал, ачааллын үүсгэсэн хазайлтад зохистой засварлалт хийхийн тулд бодит цагт урвуу холбоос ба хаалттай гүрвэлдүүр засварлалт ашиглан өндөр байрлалын нарийн төвөгтэй бүтэц хангаж авдаг.
Серво гидравлик системд энергийн үр дүнтэй ашиглалтын ямар арга хэрэглэдэг вэ?
Энергийн үр дүнтэй ашиглалтын арга хэрэглэдэг: сэргээгч хэлхээс, ачааллыг илрүүлэгч насос, бага хэмжээт дулаан солигчид, хувьсах хурдны хөдөлгүүрүүд.
Орчин үеийн серво гидравлик системд IIoT ба оюмнэлт диагностика яаж интеграцид хамрагддаг вэ?
IIoT ба оюмнэлт диагностика нь урьдчилан таамаглаж, системийн үр дүнтэй ажиллах чадварыг сонгож, сайжруулж хүртэл хүрэхийн тулд доторх сенсорууд ба бодит цагт утас-телеметрийн тусламжтайгаар интеграцид хамрагддаг.
Индустриал серво гидравлик хэрэглээд компонентуудын хэмжээ тодорхойлохдоо юу чухал вэ?
Компонентуудын хэмжээ тодорхойлохдоо хэрэглээний ачааллын профиль ба ажиллах циклд анхаарах шаардлагатай; үүнд үр дүнтэй ажиллах чадвар, энергийн үр дүнтэй ашиглалт, урт үйлдлийн хугацаа зохистой тэнцвэрт байх ёстой.
Агуулгын хүснэгт
- Серво гидравлик системийн үндэсний архитектур
- Өндөр үр дүнтэй серво гидравлик системүүдийн шүүлтүүр дизайн хүчин зүйлс
- IIoT-бүлүүрт интеграци ба орчин үеийн серво гидравлик системүүдийн ухаалаг диагностика
- Төвөгтэй гидравлик хэрэглээсүүлд промышленн серво системийн компонентуудын хэмжээ тодорхойлох, сонгох дүрэмжүүл
-
Түүн дээрх асуулт хариулт
- Серво гидравлик системийн үндсэн бүрдүүлэгч хэсгүүд юу вэ?
- Серво гидравлик систем нь яаж өндөр байрлалын нарийн төвөгтэй бүтэц хангаж авдаг вэ?
- Серво гидравлик системд энергийн үр дүнтэй ашиглалтын ямар арга хэрэглэдэг вэ?
- Орчин үеийн серво гидравлик системд IIoT ба оюмнэлт диагностика яаж интеграцид хамрагддаг вэ?
- Индустриал серво гидравлик хэрэглээд компонентуудын хэмжээ тодорхойлохдоо юу чухал вэ?