Arkitektur Asas Sistem Hidraulik Servo
Susunan Unit Kuasa Terkamir, Injap Servo, Penggerak, dan Sensor Suap Balik
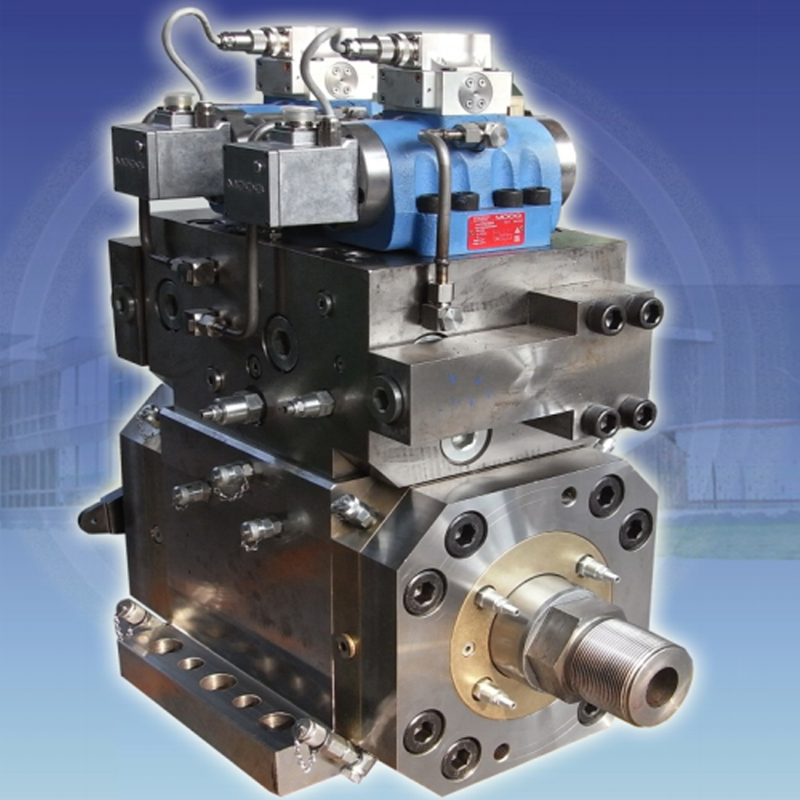
Arkitektur utama sistem hidraulik servo mengintegrasikan empat komponen saling bersandar: unit kuasa, injap servo, penggerak, dan sensor suapan balik. Unit kuasa—biasanya sebuah pam berubah sesaran yang dipacu oleh motor—menghasilkan cecair hidraulik bertekanan yang dikawal. Injap servo, yang berfungsi sebagai penterjemah elektro-hidraulik, mengubah arah dan isipadu aliran secara tepat sebagai tindak balas terhadap isyarat kawalan elektronik. Cecair yang dikawal ini menggerakkan penggerak (silinder atau motor putar), menukar tenaga hidraulik kepada gerakan mekanikal berdaya tinggi dan ketepatan tinggi. Suapan balik posisi, halaju, atau daya secara masa nyata diberikan oleh sensor seperti transformer pemboleh ubah linear (LVDT) atau penyandian optik beresolusi tinggi—membolehkan pembetulan gelung tertutup dengan ulangan sub-milimeter. Dalam aplikasi seperti pengecap logam presisi, arkitektur ini mencapai ketepatan kedudukan ±0.1 mm dengan secara berterusan mengimbangi hanyutan haba, keanjalan, dan pesongan akibat beban.
Aliran Isyarat dari Input Arahan ke Output Daya/Kedudukan: Antara Muka Elektro-Hidraulik
Jujukan kawalan bermula dengan isyarat arahan—biasanya voltan atau titik tetap digital daripada PLC atau pengawal gerakan—yang diterjemahkan kepada anjakan spul di dalam injap servo. Tindakan ini mengarahkan bendalir bertekanan ke ruang aktuator yang sesuai, mencipta perbezaan tekanan yang diperlukan untuk pergerakan. Apabila aktuator bergerak, sensor suapan balik menghantar data kedudukan sebenar atau daya kepada pengawal, yang kemudiannya mengira ralat dan mengeluarkan output pembetulan. Kestabilan bergantung kepada penyesuaian tepat: contohnya, zon mati injap yang tidak dikoreksi boleh menyebabkan ayunan melebihi ±2% daripada titik tetap dalam sistem berinertia tinggi. Walaupun mampatan bendalir dan inersia mekanikal secara semula jadi menghadkan lebar jalur, pengawal moden menggunakan algoritma ramalan—termasuk penjadualan ganjaran adaptif—untuk mengekalkan kestabilan semasa peralihan beban pantas dari 0–100% tanpa mengorbankan ketepatan tindak balas.

Pemacu Reka Bentuk Kritikal untuk Sistem Hidraulik Servo Berprestasi Tinggi
Tindak Balas Dinamik, Had Lebar Jalur, dan Keperluan Kestabilan Gelung Tertutup
Sistem hidraulik servo berprestasi tinggi ditakrifkan oleh tiga keperluan rekabentuk yang saling berkait rapat: kelajuan sambutan dinamik, lebar jalur yang boleh digunakan, dan kestabilan gelung tertutup. Lebar jalur—iaitu frekuensi di mana keuntungan sistem merosot sebanyak 3 dB—biasanya terhad kepada 15–30 Hz dalam aplikasi industri berinertia tinggi disebabkan resonans hidraulik, mampatan bendalir, dan dinamik injap/aktuator. Melebihi had-had ini menimbulkan risiko kelengahan fasa, lonjakan berlebihan (overshoot), dan ketidakstabilan; dalam tekanan tempa, lonjakan berlebihan ≥5% boleh menjejaskan integriti komponen atau merosakkan perkakasan. Rekabentuk terkini mengatasi masalah ini melalui pemodelan ketat penyebaran gelombang tekanan dan mod resonan, dikombinasikan dengan strategi kawalan lanjutan. Sebagai contoh, penjadualan ganjaran adaptif mengurangkan lonjakan berlebihan sebanyak 40% berbanding PID parameter tetap sambil mengekalkan kelengahan kawalan <1 ms—membolehkan prestasi yang mantap di pelbagai beban dan kelajuan.
Strategi Kecekapan Tenaga: Litar Regeneratif, Pengesan Beban, dan Pembuangan Haba
Kecekapan tenaga bukan lagi sekunder—ia merupakan komponen penting bagi kelayakan sistem. Litar regeneratif memulihkan tenaga inersia semasa nyahpecutan, mengarahkan semula sehingga 65% daripada tenaga yang biasanya terbuang kembali ke dalam sistem. Pam berpengesan beban secara dinamik menyesuaikan aliran dan tekanan mengikut tuntutan aktuator secara masa nyata, dengan demikian mengelakkan kehilangan tenaga akibat pengecilan yang tidak perlu. Pengurusan haba juga sama pentingnya: penukar haba padat yang dipasangkan dengan isipadu minyak yang dioptimumkan mengurangkan beban haba sebanyak 30%; pemacu kelajuan boleh ubah mengurangkan penggunaan tenaga pam pada keadaan tanpa beban sebanyak 55% berbanding unit berpelupusan tetap; dan rekabentuk silinder pintar—yang dilengkapi saluran dalaman aliran laminar—meminimumkan kehilangan likat. Secara keseluruhan, strategi-strategi ini memberikan penjimatan tenaga sehingga 70% di seluruh sistem sambil mengekalkan kestabilan haba yang mematuhi piawaian ISO 4413 dan integriti jangka panjang bendalir.
Integrasi Sedia-IIoT dan Gambaran Pintar dalam Sistem Hidraulik Servo Moden
Sistem hidraulik servo moden menggabungkan kemampuan Internet Perindustrian Segala Benda (IIoT) untuk mengubah penyelenggaraan reaktif kepada operasi proaktif berbasis data. Sensor tekanan, suhu, aliran, dan getaran yang dipasang di dalam sistem menghantar telemetri masa nyata ke pemproses tepi, di mana algoritma ramalan mengenal pasti anoma awal—seperti haus spool injap atau kehilangan gas dalam akumulator—sebelum ia berkembang menjadi kegagalan. Papan pemuka yang bersambung ke awan membolehkan pemantauan kesihatan dan diagnosis dari jarak jauh, mengurangkan masa henti tidak dirancang sehingga 45%. Analitik lanjutan menghubungkaitkan aliran data pelbagai sensor untuk mengoptimumkan penggunaan tenaga, mengesan penyimpangan halus dalam profil pergerakan, dan bahkan menyesuaikan secara automatik parameter kawalan—contohnya, menyesuaikan lengkung tindak balas injap berdasarkan perubahan kelikatan cecair yang diukur secara in situ. Penggabungan kecerdasan tepi dengan penggerakan hidraulik ini membolehkan penyelenggaraan berdasarkan keadaan, memperpanjang jangka hayat komponen serta mengekalkan prestasi ketepatan dalam kitaran tugas yang mencabar.
Amalan Terbaik untuk Penyesuaian Saiz dan Pemilihan Komponen dalam Aplikasi Hidraulik Servo Industri
Penyesuaian Saiz Pam, Silinder, Akumulator, dan Injap Proportional-Servo Berdasarkan Profil Beban dan Kitaran Tugas
Penyesuaian saiz komponen yang optimum menyeimbangkan prestasi, kecekapan, dan jangka hayat—dan mesti berdasarkan profil beban sebenar serta kitaran tugas aplikasi tersebut. Pam mesti membekalkan aliran puncak pada tekanan yang diperlukan tanpa kapasiti berlebihan secara kronik; saiz yang terlalu kecil menyebabkan kejatuhan tekanan di bawah beban, manakala saiz yang terlalu besar meningkatkan haba, bunyi, dan pembaziran tenaga. Akumulator, yang disesuaikan saiznya untuk penyerapan hentakan dan pemulihan tenaga, boleh dikurangkan sehingga 30% dalam aplikasi kitaran tugas tidak berterusan berbanding operasi berterusan. Diameter silinder dan langkah ditentukan oleh keperluan daya dan halaju, dengan diameter batang dipilih secara teliti untuk mengelakkan kelengkungan di bawah beban mampatan. Injap servo mesti memenuhi tuntutan jalur lebar sistem: bagi tugas berdinamik tinggi seperti pengendalian bahan robotik, injap dengan masa tindak balas <10 ms dan kapasiti aliran yang mencukupi adalah penting. Kerangka berikut membimbing pemilihan:
| Komponen | Faktor Penyesuaian Saiz Utama | Pertimbangan Kitaran Tugas |
|---|---|---|
| Pam | Kadar aliran pada tekanan puncak | Kuasa berterusan berbanding kuasa tidak berterusan |
| Silinder | Daya/Panjang langkah pada kelajuan maksimum | Kehausan segel di bawah beban kitaran |
| Pengumpul | Isipadu cecair untuk penyerapan hentakan | Penyenggaraan tekanan pra-cas |
| Injap Servo | Lebar jalur vs. sambutan sistem | Pembuangan haba semasa kitaran |
Resolusi transduser, kadar persampelan pengawal, dan pelarasan masa nyata untuk kawalan gerakan tepat
Kawalan pergerakan pada tahap mikron menuntut kesetiaan berkadar di sepanjang rantai isyarat keseluruhan. Resolusi transduser mesti melebihi ketepatan sasaran sekurang-kurangnya 5×—oleh itu, toleransi kedudukan ±5 μm memerlukan resolusi sensor ≤1 μm. Kadar pensampelan pengawal mesti 5–10× lebar jalur berkesan sistem untuk mengelakkan penggandaan alias dan kelambatan fasa; bagi sistem dengan lebar jalur 100 Hz, pensampelan pada 500–1000 Hz adalah wajib. Penyesuaian masa nyata—menggunakan algoritma PID adaptif—menyesuaikan secara dinamik nilai ganjaran sebagai tindak balas terhadap perubahan geseran, beban, atau suhu, mengurangkan masa penenangan sebanyak 40% dalam persekitaran dengan keadaan berubah-ubah. Analisis getaran semasa pemasangan membantu mengenal pasti dan menekan resonans mekanikal, memastikan pergerakan yang stabil dan bebas gegar di seluruh julat operasi.

Soalan Lazim
Apakah komponen utama sistem hidraulik servo?
Komponen utama sistem hidraulik servo ialah unit kuasa, injap servo, penggerak, dan sensor suapan balik.
Bagaimana sistem hidraulik servo mencapai ketepatan kedudukan yang tinggi?
Sistem ini mencapai ketepatan kedudukan yang tinggi melalui suapan balik masa nyata dan pembetulan gelung tertutup yang mengimbangi hanyutan haba, kelenturan, dan pesongan akibat beban.
Apakah strategi kecekapan tenaga dalam sistem hidraulik servo?
Strategi kecekapan tenaga termasuk litar regeneratif, pam pengesan beban, penukar haba padat, dan pemacu kelajuan berubah.
Bagaimana IIoT dan gambaran pepijat pintar diintegrasikan ke dalam sistem hidraulik servo moden?
IIoT dan gambaran pepijat pintar diintegrasikan melalui sensor dalaman dan telemetri masa nyata yang membolehkan penyelenggaraan berjadual dan mengoptimumkan prestasi sistem.
Apakah yang penting dalam penyesuaian saiz komponen untuk aplikasi hidraulik servo industri?
Penyesuaian saiz komponen harus mempertimbangkan profil beban dan kitar tugas aplikasi, dengan menyeimbangkan prestasi, kecekapan, dan jangka hayat.
Kandungan
- Arkitektur Asas Sistem Hidraulik Servo
- Pemacu Reka Bentuk Kritikal untuk Sistem Hidraulik Servo Berprestasi Tinggi
- Integrasi Sedia-IIoT dan Gambaran Pintar dalam Sistem Hidraulik Servo Moden
- Amalan Terbaik untuk Penyesuaian Saiz dan Pemilihan Komponen dalam Aplikasi Hidraulik Servo Industri
-
Soalan Lazim
- Apakah komponen utama sistem hidraulik servo?
- Bagaimana sistem hidraulik servo mencapai ketepatan kedudukan yang tinggi?
- Apakah strategi kecekapan tenaga dalam sistem hidraulik servo?
- Bagaimana IIoT dan gambaran pepijat pintar diintegrasikan ke dalam sistem hidraulik servo moden?
- Apakah yang penting dalam penyesuaian saiz komponen untuk aplikasi hidraulik servo industri?