Grunnleggende arkitektur for et servohydraulisk system
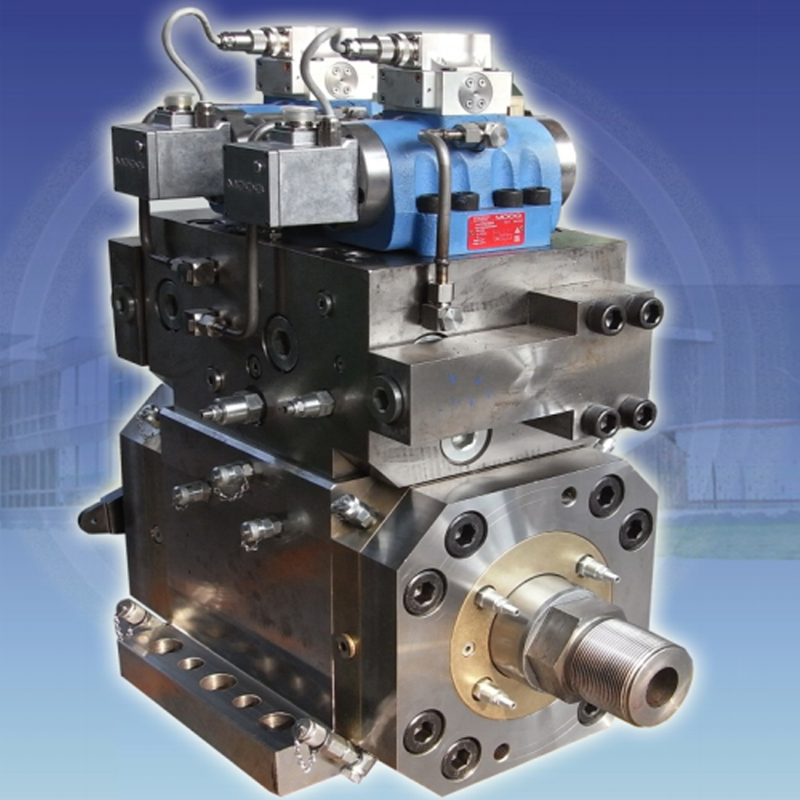
Integrert kraftenhet, servoventil, aktuator og tilbakekoplingsensoroppsett
En servohydraulisk systems kjernearkitektur integrerer fire gjensidig avhengige komponenter: kraftenheten, servoventilen, aktuatoren og tilbakemeldingssensoren. Kraftenheten – vanligvis en pumpe med variabel fortrengning som drives av en motor – genererer kontrollert, trykkfylt hydraulikkvæske. Servoventilen, som fungerer som en elektro-hydraulisk omsetter, modulerer nøyaktig strømningsretning og -volum i svar på elektroniske styresignaler. Den regulerte væsken driver aktuatoren (sylinder eller roterende motor), som konverterer hydraulisk energi til mekanisk bevegelse med høy kraft og høy nøyaktighet. Tilbakemelding i sanntid om posisjon, hastighet eller kraft leveres av sensorer som lineære variable differensialtransformatorer (LVDT-er) eller optiske enkoder med høy oppløsning – noe som muliggjør lukket-sløyfe-korrigering med gjentagbarhet på under én millimeter. I applikasjoner som presis metallstansing oppnår denne arkitekturen en posisjonsnøyaktighet på ±0,1 mm ved å kontinuerlig kompensere for termisk drift, deformasjon og lastindusert utbøyning.
Signalstrøm fra kommandoinngang til kraft/posisjonsutgang: Elektrohydraulisk grensesnitt
Styringssekvensen starter med et kommandosignal – vanligvis en spenning eller digital innstilling fra en PLC eller bevegelsesstyring – som omsettes til spolforflytning i servostyreventilen. Denne handlingen styrer trykkfluidet til den aktuelle aktuatorkammeret, og skaper det trykkforskjellen som er nødvendig for bevegelse. Når aktuatoren beveger seg, sender tilbakekoplingsensorer faktisk posisjons- eller kraftdata til styringen, som beregner feilen og gir ut korrektivt utgangssignal. Stabiliteten avhenger av nøyaktig kalibrering: ujustert ventildødgang kan for eksempel føre til svingninger på over ±2 % av innstillingen i systemer med høy treghetsmasse. Selv om fluidkompressibilitet og mekanisk treghet per definisjon begrenser båndbredden, bruker moderne styringer prediktive algoritmer – inkludert adaptiv forsterkningsplanlegging – for å opprettholde stabilitet under rask overgang fra 0–100 % belastning uten å ofre nøyaktigheten i responsen.

Kritiske designfaktorer for høyytelses servo-hydrauliske systemer
Dynamisk respons, båndbreddebegrensninger og krav til stabilitet i lukkede løkker
Høytytende servohydrauliske systemer defineres av tre tett koblete designkrav: dynamisk responstid, bruksbar båndbredde og lukket-loop-stabilitet. Båndbredde – frekvensen der systemforsterkningen synker med 3 dB – er typisk begrenset til 15–30 Hz i industrielle applikasjoner med høy treghetsmoment på grunn av hydraulisk resonans, væskens kompressibilitet og ventils-/aktuator-dynamikk. Å overskride disse grensene fører til risiko for fasedrift, oversving og ustabilitet; i smiepresser kan en oversving ≥5 % påvirke delens integritet eller skade verktøy. Ledende designløsninger takler dette ved hjelp av nøyaktig modellering av trykkbølgeutbredelse og resonansmoder, kombinert med avanserte styringsstrategier. Adaptiv forsterkningsplanlegging reduserer for eksempel oversving med 40 % sammenlignet med faste PID-parametre, samtidig som den opprettholder en styrelatens på <1 ms – noe som muliggjør robust ytelse ved varierende belastninger og hastigheter.
Strategier for energieffektivitet: Regenerativ krets, lastfølsomhet og varmeavledning
Energiefektivitet er ikke lenger sekundær – den er integrert i systemets levedyktighet. Regenerativkretser gjenvinnes treghetsenergi under bremsing og omdirigerer opp til 65 % av ellers spildt effekt tilbake til systemet. Lastfølsomme pumper tilpasser dynamisk strømningshastighet og trykk til aktuatorbehovet i sanntid, noe som eliminerer unødvendige tap ved struping. Termisk styring er like viktig: kompakte varmevekslere kombinert med optimaliserte oljemengder reduserer termisk belastning med 30 %; variabelhastighetsdrev reduserer pumpens tomgangsenergiforbruk med 55 % sammenlignet med fastvolumenheter; og intelligente sylinderkonstruksjoner – med laminære interne kanaler – minimerer viskøse tap. Sammen gir disse strategiene opp til 70 % energibesparelse for hele systemet, samtidig som ISO 4413-konform termisk stabilitet og langvarig væskeintegritet opprettholdes.
IIoT-klar integrasjon og intelligent feildiagnostikk i moderne servohydrauliske systemer
Moderne servohydrauliske systemer innebygger funksjoner for Industrial Internet of Things (IIoT) for å omgjøre reaktiv vedlikehold til proaktiv, datadrevet drift. Trykk-, temperatur-, strømnings- og vibrasjonssensorer ombord sender sanntidstelemetri til kantprosessorer, der prediktive algoritmer identifiserer tidlige avvik – for eksempel slitasje på ventilstempel eller tap av gass i akkumulatorer – før de utvikler seg til feil. Skytkoblede kontrollpaneler muliggjør fjernovervåking av systemets helse og diagnostikk, noe som reduserer uplanlagt nedetid med opptil 45 %. Avanserte analyser korrelerer datastrømmer fra flere sensorer for å optimere energiforbruk, oppdage subtile avvik i bevegelsesprofiler og til og med automatisk justere styringsparametre – for eksempel ved å justere ventilsvarkurver basert på målte endringer i væskens viskositet på stedet. Denne sammensmeltingen av kantintelligens og hydraulisk aktivering muliggjør vedlikehold basert på tilstand, forlenger levetiden til komponenter og sikrer presis ytelse også under krevende driftsforhold.
Beste praksis for dimensjonering og valg av komponenter for industrielle servohydrauliske applikasjoner
Dimensjonering av pumpe, sylinder, akkumulator og proporsjonal-servoventil basert på lastprofil og driftssyklus
Optimal dimensjonering av komponenter balanserer ytelse, effektivitet og levetid – og må baseres på applikasjonens faktiske belastningsprofil og driftssyklus. Pumper må levere maksimalt volumstrøm ved krevede trykk uten vedvarende overkapasitet; for liten dimensjonering fører til trykkfall under belastning, mens for stor dimensjonering øker varmeutvikling, støy og energispenning. Akkumulatorer, dimensjonert for å absorbere spissbelastninger og gjenvinne energi, kan reduseres med opptil 30 % i applikasjoner med periodisk drift sammenlignet med kontinuerlig drift. Sylinderens diameter og slaglengde bestemmes av krefter og hastighetskrav, mens stangdiameteren velges nøye for å unngå knekking under trykkbelastning. Servoventiler må oppfylle systemets båndbreddekrav: for høytdynamiske oppgaver som robotbasert materialehåndtering er ventiler med en responstid på under 10 ms og tilstrekkelig strømningskapasitet avgjørende. Følgende rammeverk veileder valget:
| Komponent | Nøkkelparameter for dimensjonering | Hensyn til driftssyklus |
|---|---|---|
| Pump | Volumstrøm ved maksimalt trykk | Kontinuerlig vs. periodisk effekt |
| Sylinder | Kraft/slaglengde ved maksimal hastighet | Tetningsslitasje under syklisk belastning |
| Akumulator | Væskevolum for støtdemping | Vedlikehold av forspenningstrykk |
| Servoventil | Båndbredde versus systemrespons | Varmeafraksjon under sykling |
Transduktør-oppløsning, kontrollerens samplingsfrekvens og sanntidsjustering for nøyaktig bevegelsesstyring
Styring av bevegelser på mikronivå krever proporsjonal nøyaktighet gjennom hele signalkjeden. Oppløsningen til transduceren må overstige målnøyaktigheten med minst 5× — så krever en posisjonstoleranse på ±5 μm en sensoroppløsning på maksimalt 1 μm. Prøvetakingsfrekvensen til kontrolleren må være 5–10× systemets effektive båndbredde for å unngå aliasing og faseforsinkelse; for et system med båndbredde på 100 Hz er derfor en prøvetakingsfrekvens på 500–1000 Hz obligatorisk. Justering i sanntid — ved hjelp av adaptive PID-algoritmer — justerer dynamisk reguleringsforsterkningene i henhold til endringer i friksjon, belastning eller temperatur, noe som reduserer innstillingstiden med 40 % i miljøer med variable forhold. Vibrasjonsanalyse under igangsetting hjelper med å identifisere og dempe mekaniske resonanser, og sikrer stabil, jitterfri bevegelse over hele driftsområdet.

Ofte stilte spørsmål
Hva er hovedkomponentene i et servohydraulisk system?
Hovedkomponentene i et servohydraulisk system er kraftenheten, servoventilen, aktuatoren og tilbakekoplings sensoren.
Hvordan oppnår et servohydraulisk system høy posisjonsnøyaktighet?
Systemet oppnår høy posisjonsnøyaktighet gjennom sanntids tilbakemelding og lukket-sløyfe-korreksjon som kompenserer for termisk drift, deformasjon og lastindusert avvik.
Hva er noen energieffektivitetsstrategier i servohydrauliske systemer?
Energieffektivitetsstrategier inkluderer regenerativkretser, lastfølsomme pumper, kompakte varmevekslere og variabelhastighetsdrifter.
Hvordan integreres IIoT og smarte diagnostikkfunksjoner i moderne servohydrauliske systemer?
IIoT og smarte diagnostikkfunksjoner integreres gjennom innebygde sensorer og sanntidstelemetri som muliggjør prediktiv vedlikehold og optimalisering av systemytelsen.
Hva er viktig for dimensjonering av komponenter i industrielle servohydrauliske applikasjoner?
Dimensjoneringen av komponenter bør ta hensyn til applikasjonens lastprofil og driftssyklus, og balansere ytelse, effektivitet og levetid.
Innholdsfortegnelse
- Grunnleggende arkitektur for et servohydraulisk system
- Kritiske designfaktorer for høyytelses servo-hydrauliske systemer
- IIoT-klar integrasjon og intelligent feildiagnostikk i moderne servohydrauliske systemer
- Beste praksis for dimensjonering og valg av komponenter for industrielle servohydrauliske applikasjoner
-
Ofte stilte spørsmål
- Hva er hovedkomponentene i et servohydraulisk system?
- Hvordan oppnår et servohydraulisk system høy posisjonsnøyaktighet?
- Hva er noen energieffektivitetsstrategier i servohydrauliske systemer?
- Hvordan integreres IIoT og smarte diagnostikkfunksjoner i moderne servohydrauliske systemer?
- Hva er viktig for dimensjonering av komponenter i industrielle servohydrauliske applikasjoner?